时间:2017-11-06 18:37
人气:
作者:admin
转换原理及参数指标
1. 采样定理
2. 为了正确无误的用图5.2.2中所示的采样信号vs表示模拟信号vi,必须满足式中, fs>=2fmax
fs为采样频率;fmax为输入信号vi的最高频率分量的频率;上式就是所谓的采样定理。满足采样定理的条件下,可以用一个低通滤波器将信号vs还原为vi,这个低通滤波器的电压传输系数|A(f)|在低于fmax的范围内应保持不变,而在fs-fmax以前应迅速下降为零,采样定理规定了A/D转换的频率下限。
AD7792 遇到的问题/学到的知识点
学到的知识点:
1.在stm32中
U8 : unsigned char
U16: unsigned short
U32: unsigned int
2. 在stm32中 AD7792采样的电压数值要经过转换成ASCII码字符在串口中打印出来有两种编程方式实现:
u8TempD;
u16 Datau16;
char str[20];
unsigned short iData[3];
u8 Strvbat[8]={'/','/','/',',',0,0,0,0};
u8 ASCII[21]={'0','1','2','3','4','5','6','7','8','9','A','B','C','D','E','F','+',//10->16
',',//11-17
'-',//12-18
'.',//13-19
'/',//14-20
};
方式一:(简洁版)
AD_VBat[TempD] = SPI_Read16Bit();
memcpy(&iData[0],& AD_VBat[TempD],2);
sprintf(str,"%d",iData[0]);
UART1_TX485_Puts(USART1,&str[0]);
方式二:(复杂版)
AD_VBat[TempD] = SPI_Read16Bit();
Datau16 = AD_VBat[TempD];
Strvbat[0]=ASCII[Datau16/10000];
Strvbat[1]=ASCII[Datau16%10000/1000];
Strvbat[2]=ASCII[Datau16%1000/100];
Strvbat[3]=ASCII[Datau16%100/10];
Strvbat[4]=ASCII[Datau16%10];
UART1_TX485_Puts(USART1,&Strvbat[0]);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE)==RESET);
3.遇到的问题
问题一:通过串口打印,采样的数值为32768左右转化后的电池电压为2.5V,而电池实际电压应该为3.32v采样数值应该为43582左右的数值;
问题根源:通道切换的问题;
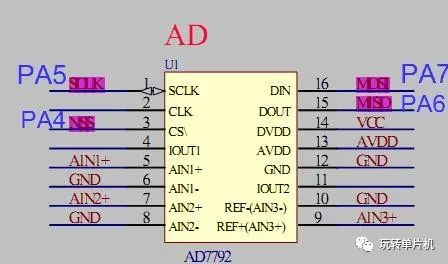
AD7792有3个模拟输入通道,初始化AD7792配置函数中,写配置寄存器SPI_SendByte(0x10); /* 写配置寄存器*/
SPI_Send16Bit(0x1080); // 偏置电压禁用禁用熔断电流单极性编码内部基准
SPI_Send16Bit(0x1080)设置的采样通道是采样电流的通道,所以采样的是电流的数值;
题二:在移植AD7792独立出来时,发现电池电压采样值打印为0000;
问题根源:SPI配置问题;
原理图:
错误配置:
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_7 ;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //通用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);
正确配置:
/* Configure SPI1 pins: SCK, MISO and MOSI */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_4|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //通用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 配置MISO为输入 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
上一篇:剖析传统数字电路和单片机的关系
下一篇:ddr3及ddr4的差异对比


 关注微信
关注微信