时间:2022-12-07 15:32
人气:
作者:admin
近年来,随着汽车工业技术不断革新和全球化竞争加剧,大部分车企内饰改用触摸屏。而车载触摸屏必须在 -40℃到+85℃ 的极端温度条件下通过严格的耐久试验方案方可获批量生产。
基于此背景,宝滨机器人研发出了一套以六维力为核心的算法与软件。
遇到的困难
触摸屏测试主要测量位移和角度等,由于人无位移和角度传感器,所以人是无法产生的位移和角度驱动信号的。因此六维力传感器和图像传感器是实现控制的终极目标,具体难点在于机器触觉和机器视觉的计算机算法。例如,飞机操纵杆作为飞机操纵系统的关键部件之一,也被称作驾驶杆,驾驶员是通过手感空间推动力作为控制输入源,并且得到相应力反馈信号驾驶飞机,而不是推动空间角度,毕竟人无法直接感知角度。
解决方案
上海宝滨机器人自动化科技有限公司致力于六维力传感器算法的开发与应用,通过与ATI的合作,近期推出以六维力为核心的算法和软件,通过第一性原理的思考方式,完成以拟人的触觉驱动电子信号和软件逻辑的测量机器人,测量从力信号到半导体总线信号,只到固件和软件的相应反应。
针对异形曲面车机黑屏或者卡顿的问题,宝滨机器人开发的一款触觉机器人可实现在-50℃~90℃、95%相对湿度、微重力和辐射环境下测试。通过AI拟人操作算法实时捕捉车辆控制总线信号,实时捕捉板级芯片总线信号,实时捕捉车辆操作系统系统状态。该工作站使用了ATI 的Gamma IP65六维力和力矩传感器,为机器人提供了力觉感知系统。
为什么使用Gamma IP65的六维力/力矩传感器?
Gamma 六维力/力矩传感器
重量轻,刚度大。
IP65版本可以防尘,防水泼溅
高强度不锈钢精密加工。
最大允许过载值是额定量程的6.9至31.6倍。
高信噪比:是传统金属应变计的75倍。放大后的信号接近零的噪声失真。
该软件系统组成如下:

系统组成
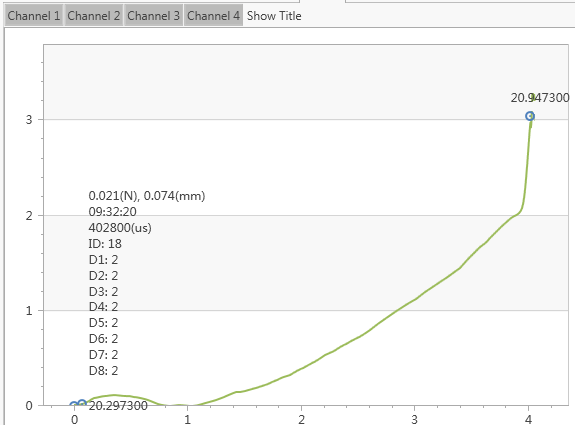
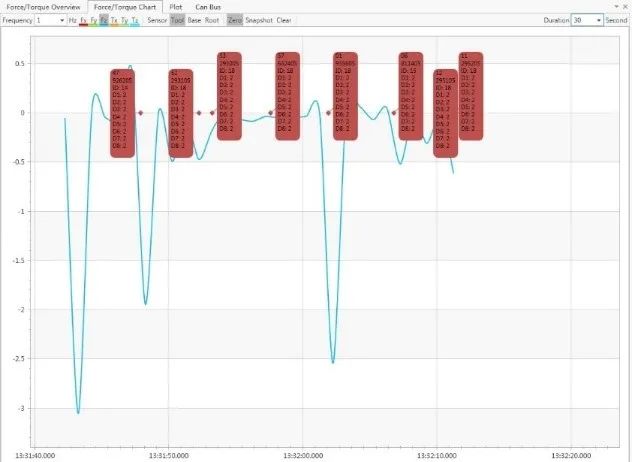
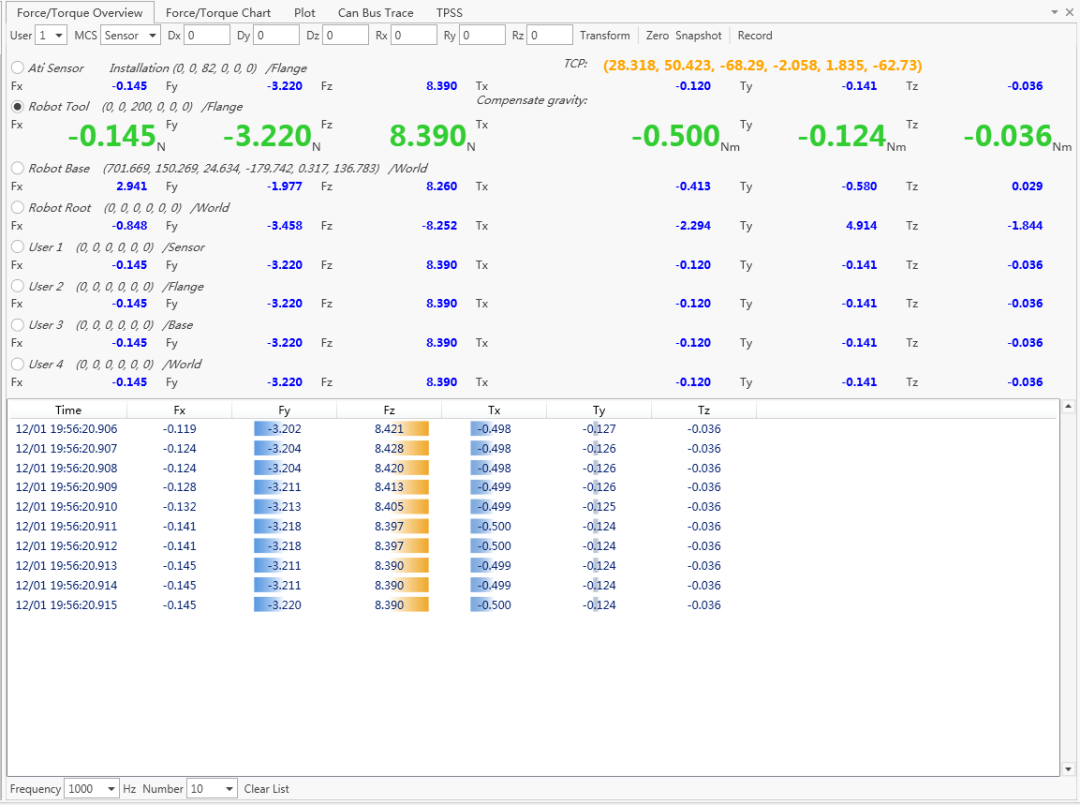
Robmas支持物理信号(N、Nm、mm)同步时间戳(1毫秒)数据采集。对大尺寸、曲面、力反馈车载触摸屏和手势识别等部件的电子和软件集成测试、提供基于人机工程学的输入信号的触发trigger信号,比如典型值1~5牛顿、40毫米,从而在-40~85摄氏度的疲劳使用工况中,分析信号完整性、延迟,软件响应时间,操作系统CPU、内存等系统资源占用率。
Robmas 支持操作系统(Linux、QNX、Android、Wince)系统API调用,同步时间戳(1微秒)系统信息数据,并且支持客户开发过程中的Eclipse、Visual Studio等IDE的Trace、log等集成调试工具工具。
Robmas 支持CAN FD信号同步时间戳(1微秒)数据采集。
通道:4(支持ISO11898-2)CAN-FD
消息每秒接收/发送 :20000 mps
时间:1微秒
Robmas 支持电子信号同步时间戳(1微秒)数据采集,采用纯软件电子示波器,从而支持客户二次开发语言(SCPI,JavaScript,C / C ++,C#,MATLAB,LabVIEW,Python,Visual Basic)。
宝滨机器人2016年以后出厂的RObvent系统仅需升级“高级内外饰套件“即可完成从传统内外饰到以触控为核心的内外饰所有测试测量项目。
编辑:黄飞


 关注微信
关注微信