时间:2012-07-27 15:52
人气:
作者:admin
电子发烧友网讯:这是我做的第一个机器人,我会详细记录下每个程序,以方便那些初学者借鉴,准确说来我做的是一个履带式的,由picaxe28x1控制,超声波传感器检测的障碍物躲避机器人。
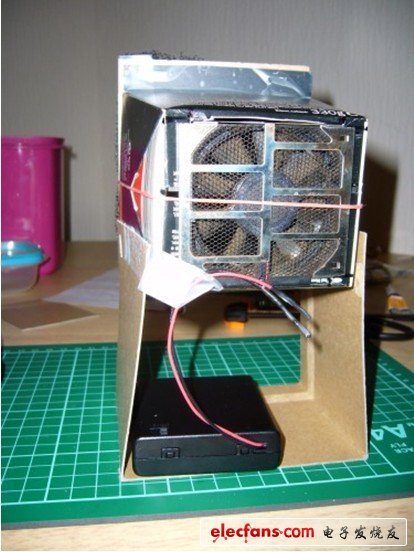
首先我焊接了一个排烟装置。这个风扇我是从一个报废的笔记本上拆下来的,我把它通过一个盒子将其连接到一个碳纤维金鱼缸过滤器上,之后接上电池盒。
因为我是用F/F跳线连接模块的,因此我需要焊接出相关的针脚,我会在picaxe上面额外添加一些插针,需要注意的是要注意针脚焊接的准确位置和角度。

因为HC-SR04超声波传感器明确的额定电压是5V,而picaxe28X1也是在5V的电压下工作状态才是最佳的,同时我们用到的电机L294D的需要,因此我还做了一个5V的电压调节器去保证超声波传感器免受电压波动影响。这样就可以保证我们机器人模组能工作在一个很稳定的电压状况下。具体做法就是我用一个工作电流1A的,5V固定电压调节器,并将其连接到6个AA电池去提供一个7.2V输入,5V输出的电压。

因为需要我搞了一个线转针的转换器。最初我想用切掉的线芯把焊点连接起来,但这样很容易造成两点之间的流锡。根据我失败的经验可以提醒各位,在做的时候最好是用到实心线。然后我用万用表去确认我的连接都是没问题的,当然,用电池和LED也可以完成同样的工作。
同时我还想要做一个可以允许电线暂时转换成pin接口的模组,其他的线和单独模拟板类型的元器件可以插入,也可以把万用表通过利用短块和F/F跳线的方式插入插槽。以下就是我做的转换器。
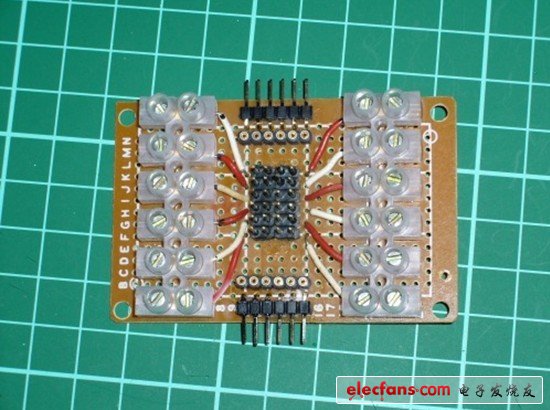
我还做了一个DIP转阵脚的转换器,这样的话就可以在有需要的时候插入额外的IC。

做以上的准备主要是考验了我焊接的能力,在过程有各种悲剧,不过终于还是完成了。
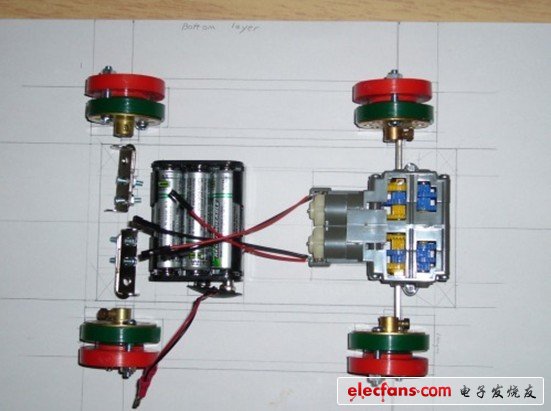
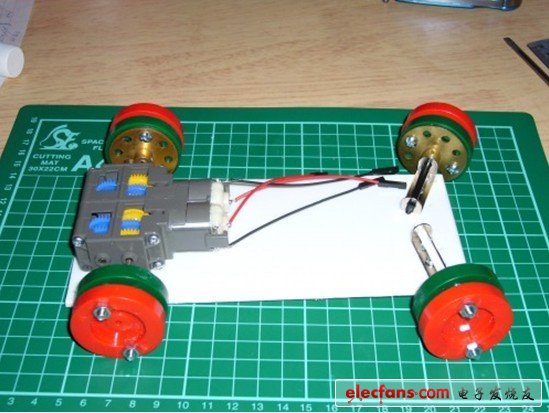
实际上这个履带的轮子是由两半组成的,我不确定是把它们固定在轴上或者是用胶水固定在指定点上面。因此我买了一些螺丝,并买了一些模型搞出了以下的东西。

我用纸笔画出了相应的模型图及位置图,下底部如下所示,这只是为了支撑,同时放电源和引擎的。
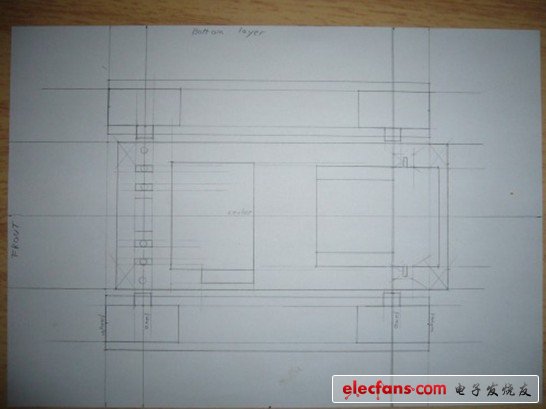
上部是控制、感应和可变的,因此需要空间放picaxe28x1,电压稳压器,线针转换器,超声波检测器,同时还需要为之后添加额外的DIP芯片预留空间。


接下来就是组装
我用一些便宜的塑料板裁剪成我需要的形状,我画出了一个图纸,并将它当做我钻孔的指导。

完成了之后我就可以装配机器人的底部了,底部看起来是倾斜的,因此我我需要使用一种手段去保证上部的水平。我在电池槽离岸边搞了些粘胶泡沫去固定它。但看起来还是能够移动。
完成了组装以后就得出了以下的一个模型。

之后就回到电气和程序方面的工作
我需要去搞出一些一些容纳伺服电机的空间以便可以转动机器人的“头部”。我又继续用到那个便宜的塑料板,我同时会制造一些孔槽保证那些线远离履带,然后将间隔器放在适当的位置,这样的话可以抬高PCB,并将它们固定。

接下来就是安装顶部,安装好电机以后,我在电池和稳压器间装个开关,这样的话我就可以断开所有的元器件,那样在我把机器人停下来的时候就不需要拔掉任何东西。

然后就放上PCB,在安装之前,我们需要检查过所有的东西都是没问题的,以避免给后面的工作带来麻烦。
接下来是我一直纠结的问题,我究竟该怎样把超声波传感器连接到电机上,并要有一定的角度保证其向前,并要尽量使传感器在更低的位置,以保证它能看到更小的物体,从而能够避开。我最后决定在一个塑料叠层板上DIY,将那些板以一定的角度连接,并连上一个4pin的接收器,在上面加些东西使其头部能够轻易转动,在一定位置巩固螺栓,以便可以在上面使用环氧树脂胶。接下来就是线的问题,相对于我的剥线器来说,这些线实在太小了。但我最终用打火机搞定。然后就连接上了相对应的线路。记住要用到适合的线。否则焊接的时候你就会感到悲剧了。

我把那些线都分开,同时在适当的位置装上扩展针槽。

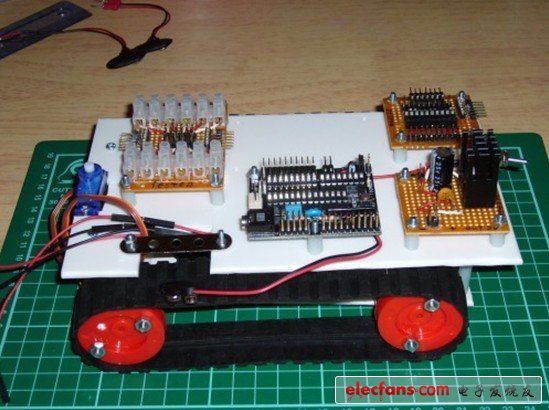
最后将他们组装在一起,下面是它的成品图

为了方便焊接,我买了一个放大镜,如下图所示

然后我决定去画一个电路图,

之后我进行了编程,并在调试的过程中发现并解决了一些小问题。在完成所有的工作之后去测试我的机器人,可得知,在光滑的路面上,机器人的抓地能力都是不错的,机器人在木质地板上转360度仅仅需要9秒钟。
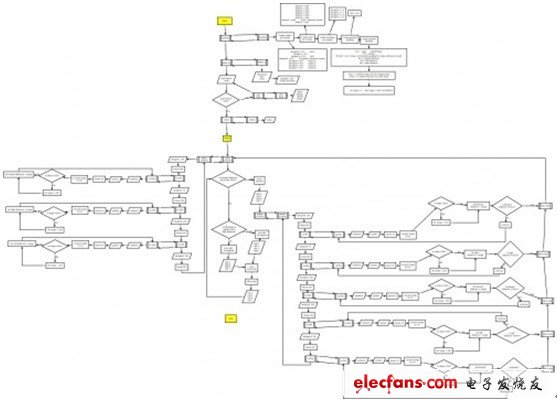
作者用DIA流程图软件去调试,并发现了一些问题,但由于LMR软件不允许作者上传实际的DIA版本,因此做了一个迷你的总体流程图。


 关注微信
关注微信