时间:2018-04-06 09:51
人气:
作者:admin
全景成像利用特殊的成像装置能从一个视点获取水平方向一周360°、垂直方向达到半球以上视场的多方向图像,由于成像范围大、成像快等特点,可为军事侦查、机器人导航、虚拟现实、计算机视觉等领域提供大视场场景的立体感知和重现功能,近年来发展快速,成为光电子学、计算机视觉和计算机图形学的研究热点。
目前为止,主要有三种实现全景成像的方法:图像拼接法、鱼眼镜头法和折反射全景成像法[1]。基于图像拼接的全景成像方法之一是使相机绕通过其光心的垂直轴线旋转对多个方向的场景成像,再将这些不同方向的场景图像拼接成一幅全景图。这种方法,虽然成像分辨力高,但成像速度慢,拼接算法复杂,一般只能拼接出柱面全景图像,不能满足单一视点要求,且成本高,系统复杂,不能满足实时全景成像的需要。鱼眼镜头在获得大视场的同时又有其缺点,即会产生严重的桶形畸变,很难校正,且成像分辨率低。高质量的鱼眼透镜通常采用10片以上的结构和高质量的光学材料,因此系统复杂,造价成本昂贵。折反射式全景成像技术由于具有一次性大范围成像特点,实时性能优,并且结构简单、无扫描部件,无拼接,因而可以作为替代现有航空全景相机的重要技术。但由于无人机起落架的存在,使得折反射式全景相机在获取全方位图像时,总是存在由于起落架的遮挡而造成图像获取要素不完整、成像质量不高等问题。
本文设计了一种防止无人机起落架影响全景相机视场的可翻转支架系统,通过超声波传感器测量机体离地安全距离后,微处理器控制全景相机及支架的上下翻转,可以防止全景相机进行全景图像采集时无人机起落架落入图像内,提高图像采集要素的完整性和图像的质量,获取全方位无起落架干扰的全景图像。
通常,无人机折反射全景成像系统由无人机、折反射全景相机和数据处理单元等组成,如图1所示。折反射全景相机成像可以获得水平方向360°、垂直方向210°的大视场场景图像。折反射全景相机通常置放于无人机机身正下方,但由于无人机两侧起落架的位置低于全景相机,导致全景图像始终出现该起落架,影响图像的进一步解读,如图2所示。
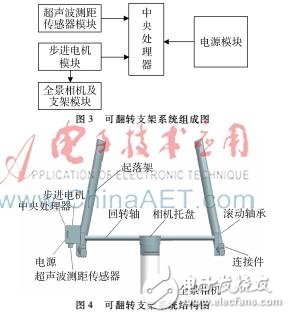
防止无人机起落架影响全景相机视场的可翻转支架系统由超声波测距传感器模块、步进电机模块、中央处理器模块、全景相机及支架模块和电源模块组成[23],如图3所示。其中,超声波测距传感器模块用来测量无人机机体底部距离地面的垂直距离[45],步进电机[6]模块用来驱动全景相机及支架模块的垂直180°翻转,中央处理器模块[7]根据超声波测距传感器模块测量的距离信息控制步进电机模块的正反转,电源模块用来为系统供电。全景相机置放于起落架底部相交的回转轴的中部,通过滚动轴承进行上下翻转。




 关注微信
关注微信