时间:2025-03-12 11:42
人气:
作者:admin
AgiBot World Colosseo:构建通用机器人智能的规模化数据平台随着人工智能在语言处理和计算机视觉领域取得突破,机器人技术仍面临现实场景泛化能力的挑战。这一困境的核心在于高质量机器人数据的匮乏,制约了通用操纵能力的突破。上海人工智能实验室与AgiBot公司联合研发的AgiBot World Colosseo平台,通过构建大规模、多模态的真实世界数据集与通用政策模型,为机器人学习领域开辟了新的范式。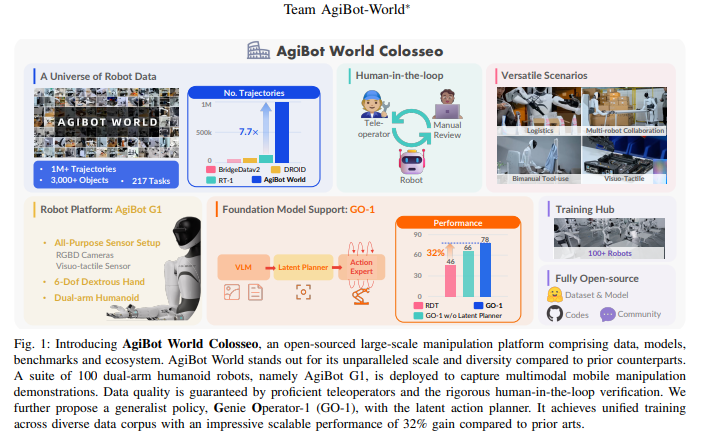
论文下载:*附件:论文 AgiBot World Colosseo Large-scale Manipulation Platform.pdf
传统机器人数据集(如RoboNet、BridgeData)受限于场景单一性和硬件异构性,难以支撑复杂任务的泛化学习。AgiBot World Colosseo以4000平方米的实体设施模拟家庭、工业、餐饮等五大真实场景,部署100台AgiBot G1双臂人形机器人,累计采集超100万条轨迹数据(时长2976小时),涵盖217项任务和87种技能。这一规模较现有数据集(如Open X-Embodiment的240万条轨迹)虽在数量上相近,但AgiBot World通过标准化采集流程与“人在回路”验证机制,保证了数据的高质量与场景的真实性。例如,工业场景中机器人需协作完成零件装配,餐饮场景则涉及餐具精细化操作,这些任务均需结合视觉、触觉与语言指令的多模态交互。
AgiBot World的数据优势体现在三个维度:
**1. ** 硬件标准化 :统一采用配备全身控制、灵巧手与视触觉传感器的AgiBot G1机器人,消除硬件差异对政策泛化的影响。
**2. ** 任务设计多样性 :涵盖从工具使用到多机器人协同的复杂长时序任务,例如“整理零售货架”需机器人识别商品类别、规划路径并避免碰撞。
**3. ** 人类反馈闭环 :由专业操作员通过远程操控生成示范数据,并通过实时验证修正错误,确保每条轨迹的有效性。此外,平台特意保留失败恢复数据(标注错误状态),为政策鲁棒性训练提供素材。
这一体系使得AgiBot World在数据质量上显著超越同类项目。例如,DROID虽通过众包扩展场景多样性,但因缺乏质量把控,政策性能在真实场景中表现不佳;而AgiBot World通过标准化流程与人工审核,将成功率提升至60%以上。
为解决现有机器人模型依赖特定数据集的问题,AgiBot World团队开发了Genie Operator-1(GO-1)政策。该框架创新点在于:
**● ** 潜在动作规划 :通过将人类视频与机器人数据统一映射至潜在动作空间,实现跨模态知识迁移。
**● ** 分层学习架构 :底层采用预训练的视觉语言模型(VLM)处理环境感知,上层通过强化学习优化序列决策。
**● ** 可扩展训练 :利用AgiBot World数据集的规模优势,政策性能随数据量增加呈线性提升,较基准方法(RDT)提升32%。
实验表明,在复杂长时序任务(如“制作咖啡”)中,GO-1成功率达63%,远超传统方法。同时,仅使用AgiBot World 10%数据预训练的模型,在泛化性能上仍比Open X-Embodiment提升18%,验证了数据集的高效性。
AgiBot World通过开源数据集、工具链与预训练模型,推动机器人研究向“通用智能”迈进。其贡献不仅在于构建目前最大规模的双臂机器人学习平台,更通过标准化流程为行业树立了数据质量标杆。当前局限在于评估仍依赖真实场景,团队正开发仿真环境以加速政策迭代。未来,该平台有望在家庭服务、工业自动化等领域催生更鲁棒的机器人应用。
AgiBot World Colosseo的突破揭示了规模化数据与标准化方法在机器人技术中的核心价值。通过构建真实世界的“数据罗马斗兽场”,这一平台正将机器人从单一任务执行者转变为具备泛化能力的智能体,为通用机器人智能的落地奠定关键基石。
参考
AGIBOT 世界
GitHub - OpenDriveLab/AgiBot-World: The Large-scale Manipulation Platform for Scalable and Intelligent Embodied Systems
OpenDriveLab | Robotics and Autonomous Driving at HKU, AI Lab, and beyond





 关注微信
关注微信