时间:2023-05-15 09:49
人气:
作者:admin
(每隔 12 ms 一次)循环写入一个模拟输出端。ANOUT 将触发预进停止。机器人控制系统拥有 32 个模拟输出端 ($ANOUT[1] … $ANOUT[32])。
1. 同时最多允许有四条 ANOUT ON 指令。
2. 所有用于 ANOUT 指令中的变量必须已在数据列表中进行了声明 (局部或在 $CONFIG.DAT 中)。
$ANOUT[…] 可通过 -1.0 至 +1.0 之间的值加以说明。实际产生的电压取决于模拟模块的设置。如尝试将电压值设置成超出值域范围,则机器人控制系统显示以下信息:限制 { 信号名称 }
开始循环写入:
ANOUT ON 信号名称 = 系数 * 调节项 <±偏量>
例:
在声明部分给该模拟输出端分配一个任意的名称,在该情况下为 GLUE。粘结剂量取决于当前的轨迹速度 (= 系统变量 $VEL_ACT)。此外,应提前 0.5 秒发出输出信号。最低电压应为 3 V。(使用其电压从 +10 V 至 -10 V 的模
块。)
SIGNAL GLUE $ANOUT[5]
...
ANOUT ON GLUE = 0.5 * $VEL_ACT DELAY=-0.5 MINIMUM=0.30
循环模拟输出以 ANOUT OFF 结束:
ANOUT OFF GLUE
VASS标准中KUKA机器人中的应用:
在config.dat中声明

在涂胶机器人程序中使用的模拟量输出:
ana1 ( EIN ) = VPROP: 170 [mm/Sek] OFFS: 0[mV]
VW(#ANAOUT,TRUE,2,1,170,0)
在机器人VW程序中控制模拟量的输出:
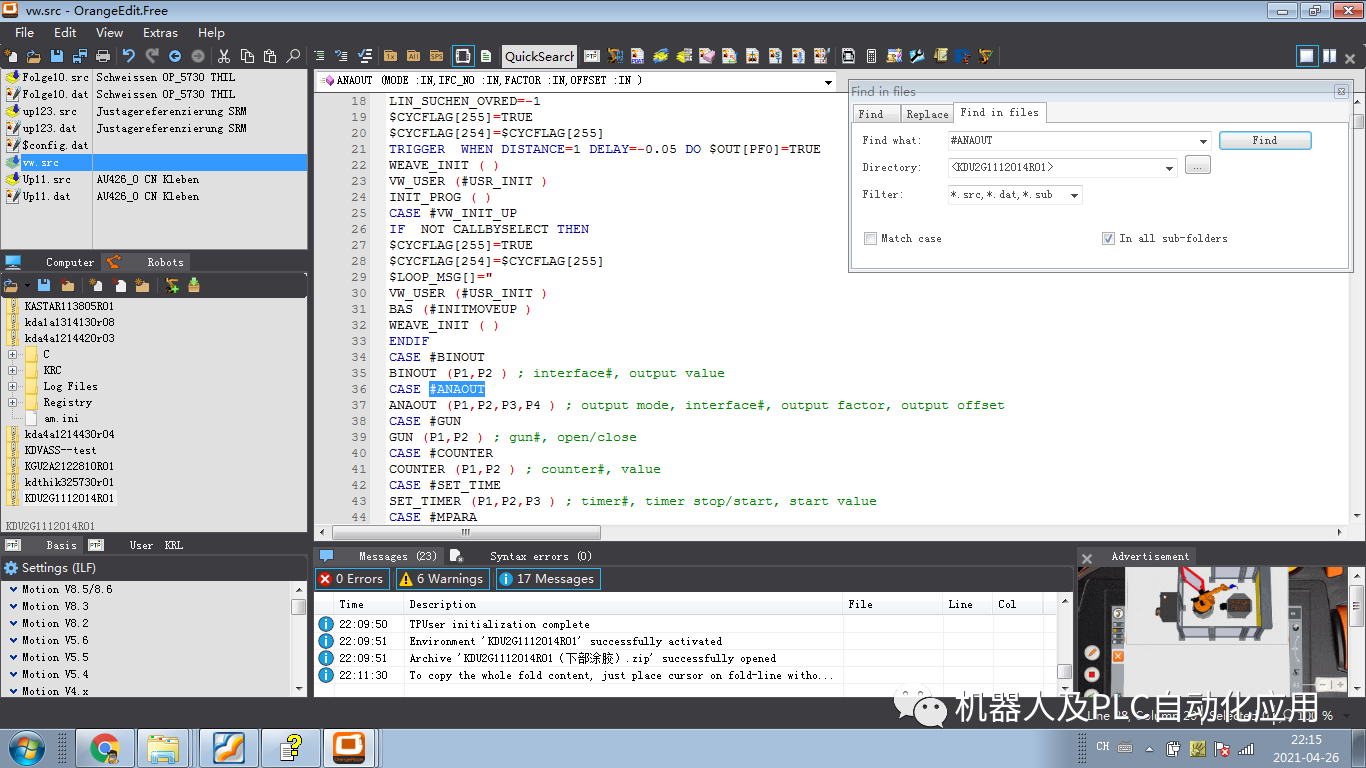
.....
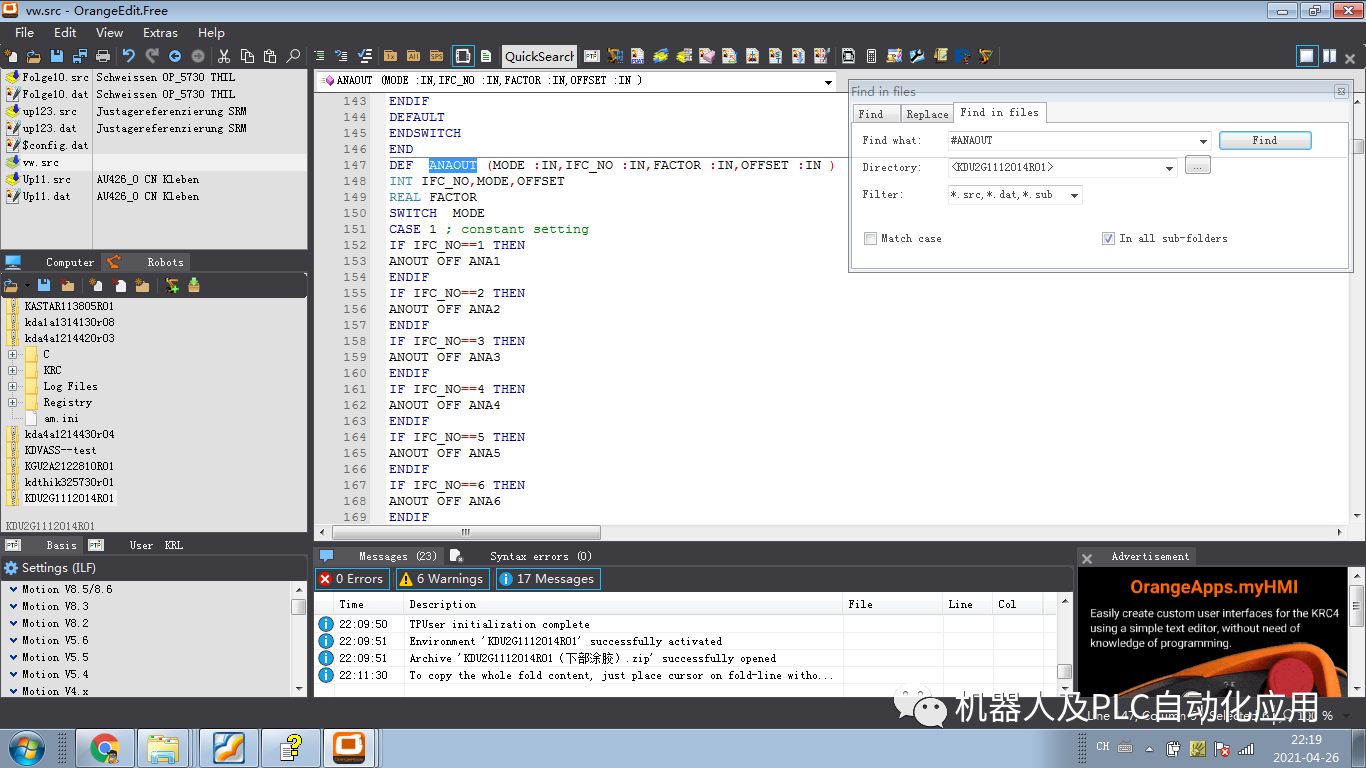
$ANOUT[IFC_NO]=FACTOR*1E-04-发出给入的模拟量的数值,=312*1e-04
CASE 2 -模拟量与速度相关联
SWITCH IFC_NO
CASE 1
OFS1=OFFSET*1E-04
IF FACTOR==0 THEN -标准值的算法
FACTOR=2E+06
ENDIF
FAC1=1000/FACTOR -正常输入值得算法FACTOR=312
-按照标准格式发出的模拟量输出-
ANOUTON ANA1=$VEL_ACT*FAC1+OFS1-打开模拟量机器人当前速度的又有关的算法,加上基数
DELAY=ANA_DELAY1 是否推迟或提前发出模拟量
.................
--------------------END------------------
审核编辑 :李倩





 关注微信
关注微信