时间:2023-05-19 11:42
人气:
作者:admin
正文
1. WorkVisual连接
打开WorkVisual,进入编程与诊断,连接机器人,读取程序;
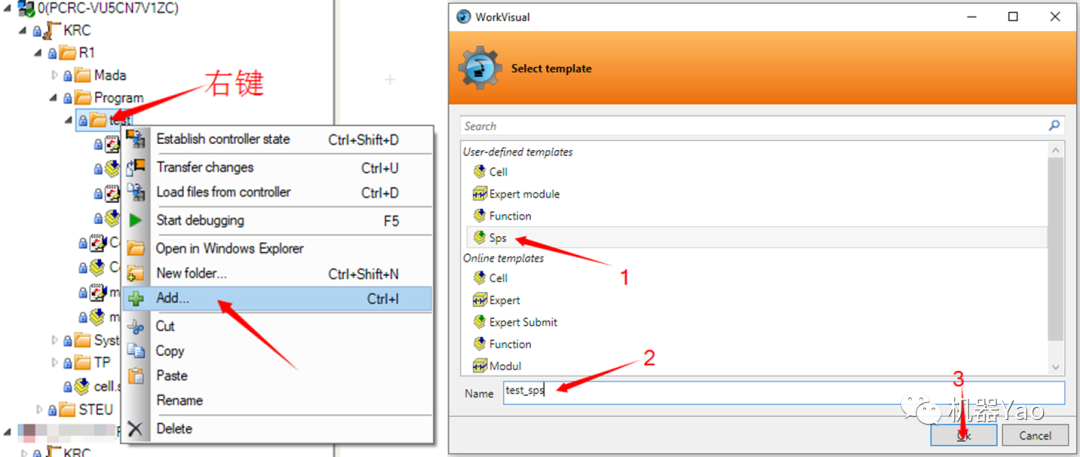
2. 新建后台程序
(1)右键对应文件夹,点击Add,新建Sps文件,输入名称(英文开头),点击OK;
3. 修改后台程序
(1)双击打开程序;
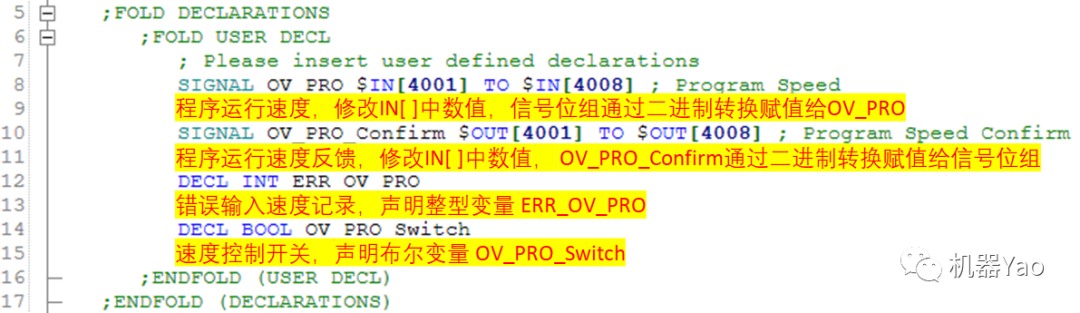
(2)在图示位置(声明)输入,语句需要修改IN[ ]和OUT[]中的内容:
SIGNAL OV_PRO **IN[4001] TO **IN[4008]
SIGNAL OV_PRO_Confirm **OUT[4001] TO **OUT[4008]
DECL INT ERR_OV_PRO
DECL BOOL OV_PRO_Switch
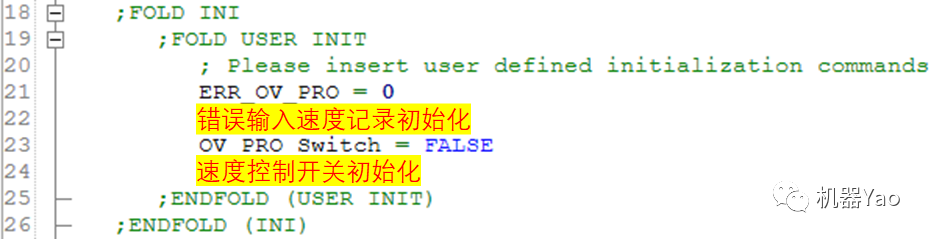
(2)在图示位置(初始化)输入:
ERR_OV_PRO = 0
OV_PRO_Switch = FALSE
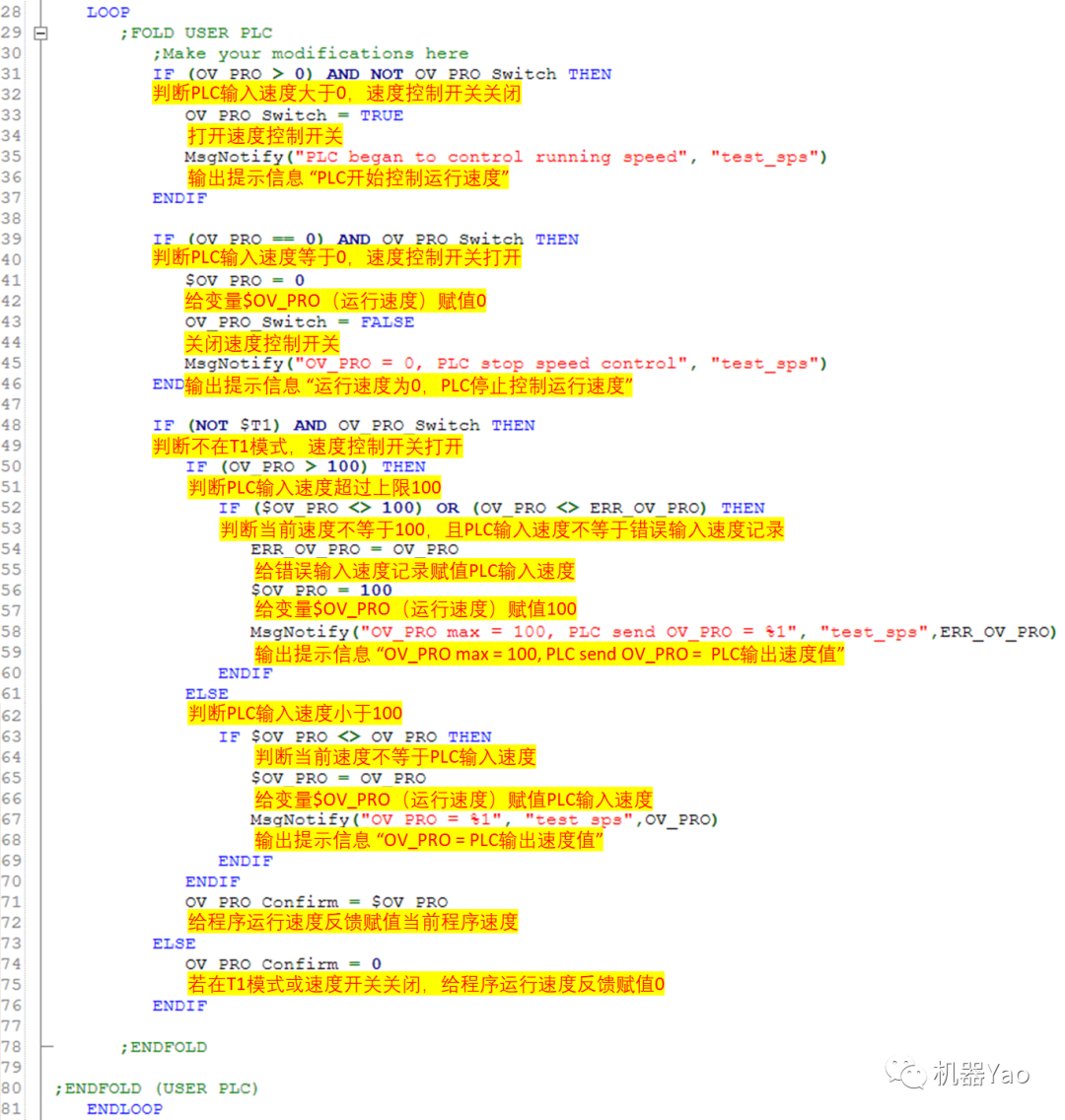
(3)在图示位置(循环)输入:
程序解释:当PLC输入速度时,速度控制开关会打开,PLC可以调控机器人速度,且会通过OUT反馈速度;当PLC输入速度0时且速度控制开关打开时,速度控制开关会关闭,并将速度减少到0,速度反馈关闭;
IF (OV_PRO > 0) AND NOT OV_PRO_Switch THEN
OV_PRO_Switch = TRUE
MsgNotify("PLC began to control running speed", "test_sps")
ENDIF
IF (OV_PRO == 0) AND OV_PRO_Switch THEN
$OV_PRO = 0
OV_PRO_Switch = FALSE
MsgNotify("OV_PRO = 0, PLC stop speed control", "test_sps")
ENDIF
IF (NOT $T1) AND OV_PRO_Switch THEN
IF (OV_PRO > 100) THEN
IF ($OV_PRO <> 100) OR (OV_PRO <> ERR_OV_PRO) THEN
ERR_OV_PRO = OV_PRO
$OV_PRO = 100
MsgNotify("OV_PRO max = 100, PLC send OV_PRO = %1", "test_sps",ERR_OV_PRO)
ENDIF
ELSE
IF $OV_PRO <> OV_PRO THEN
$OV_PRO = OV_PRO
MsgNotify("OV_PRO = %1", "test_sps",OV_PRO)
ENDIF
ENDIF
OV_PRO_Confirm = $OV_PRO
ELSE
OV_PRO_Confirm = 0
ENDIF
4. 将改动传送到控制柜
5. 设置后台程序启动
(1)登录管理员权限;
(2)点击S/显示分配;
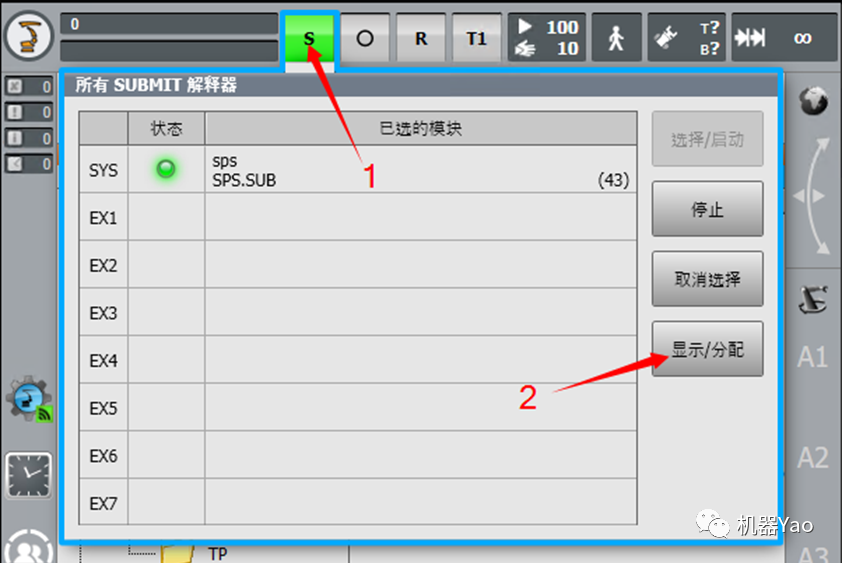
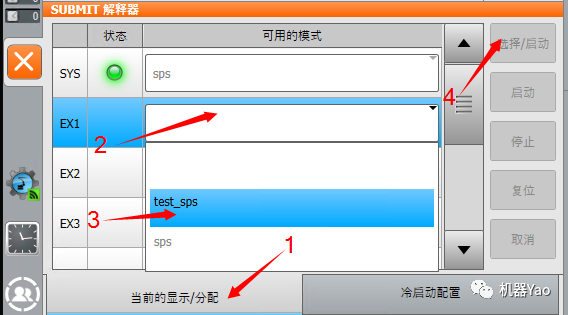
(3)点击EX1/程序名/选择启动,打开后台程序;
(4)点击冷启动配置/EX1/程序名,设置开机自动启动;
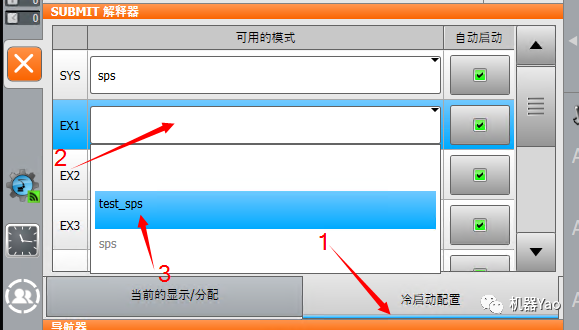
(5)关闭SUBMIT解释器配置;
(6)上位机发送 **IN[ ] TO IN[ ] 就可以通过二进制转换控制机器人自动运行时的速度,监控OUT[ ] TO **OUT[ ] 就可以获取机器人自动运行时的速度;





 关注微信
关注微信