时间:2023-02-06 10:34
人气:
作者:admin
PLC控制/监控机器人的抓手状态的功能块FB250

选择维护位置
采用“维护”(Maintenance) 按钮(切换功能),可以选择维护位置或对其进行确认。到达维护位置时,其文本将从“维护”变成“维护确认”。
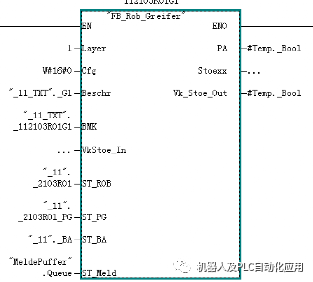
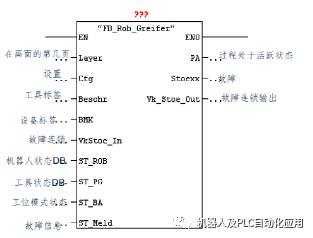
Beschr :工具标签:


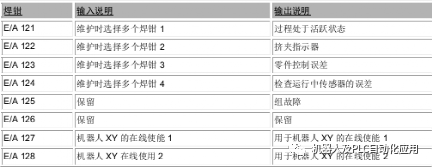
机器人反馈故障:
PA := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=0));
A121激活工具
xFVA := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=1));
A122夹爪K91不到位故障
xFBTK := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=2));
A123零件检查错误
xFSLS := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=3));
A124搜索传感器错误
xFSST := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=4));
A125总故障
注: 抓手的报警和别的工具不同,抓手的报警A122 ,A125,A121都是编辑在MAKRO342/MAKRO343里,零件检测A123, A124需要在程序里编辑.
审核编辑:刘清
上一篇:机器人各模块设计中的发展趋势
下一篇:KUKA VW机器人热身简析





 关注微信
关注微信