时间:2023-02-09 15:36
人气:
作者:admin
因自动驾驶而“闻名”的激光雷达,伴随着汽车、服务机器人等领域的需求爆发,不管是技术还是产品,都进入了一个新的发展阶段。
2013年,思岚科技推出第一款低成本激光雷达A1,打破了激光雷达被国外高价垄断的局面,得到了行业和市场的认可。至此2023年,十年时间,思岚的雷达产品线伴随着市场需求越来越丰富。

那么,到底怎样的雷达才是一款好的雷达呢?大家会习惯性先看下面几个参数,那小岚今天就先从这几个参数说起。
►
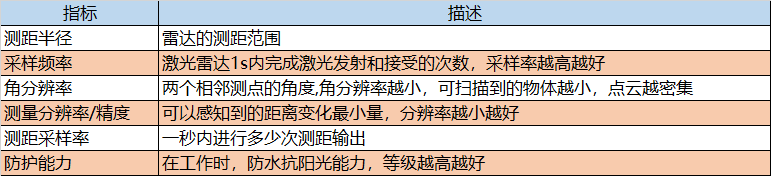
测距半径
作为主要用途是距离测量的激光雷达,其测量的最大距离(量程)自然是其最核心的指标。大部分激光雷达都会直接以测量距离作为其主要指标。思岚的激光雷达主要面向服务机器人,12m-40m测距半径完全满足需要。因为在一定成本条件下,适合的测距极限才是王道。
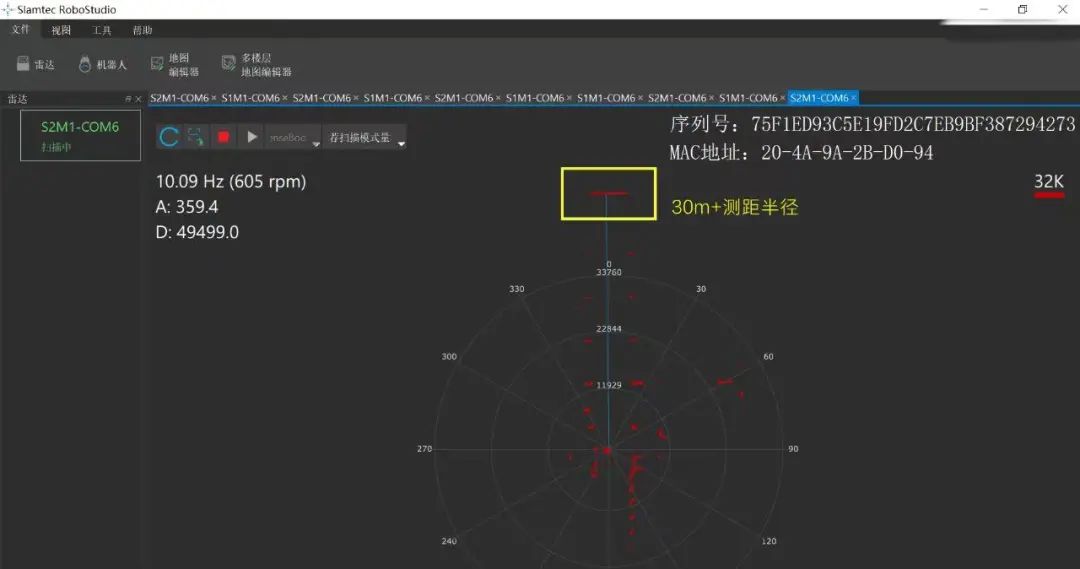
▲ RPLIDAR S2 30m测距半径
►
采样频率
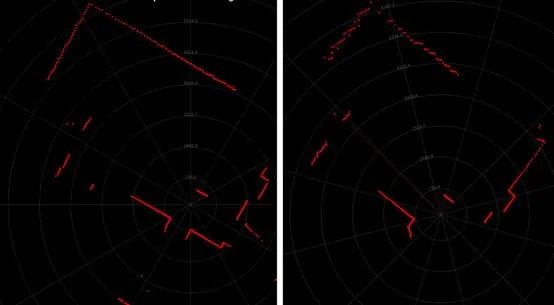
众所周知,机器人通过激光雷达扫描测距时,高采样频率可以确保进行更多次的扫描,从而获得更多数据,扫描出更为精细、质量更高的点云图,辅助机器人后续避障导航,及时做出响应。
▲ 不同采样频率下获得的点云数据
思岚科技作为机器人自主定位导航解决方案服务商,在技术改良和产品升级上从来没有停止过探索的脚步,在以实用性和可靠性作为第一考虑的情况下,提升了软件算法和内部硬件结构,没有顾此失彼。
▲ S2,32K采样频率,点云密集
►
测距分辨率
由于测量原理的关系,激光雷达一般在10米以内都可以实现很高的测距分辨率,但其分辨率会随着探测物体距离增加而剧烈下降。所以,为了获得更高质量的地图,分辨率越小越好。
因此,为了实现更好的测距分辨率,就不只是增加激光器功率这么简单了,需要对于测距核心有本质的改良。同时为了可靠量产,也需要做很多的配套工作。
►
角分辨率
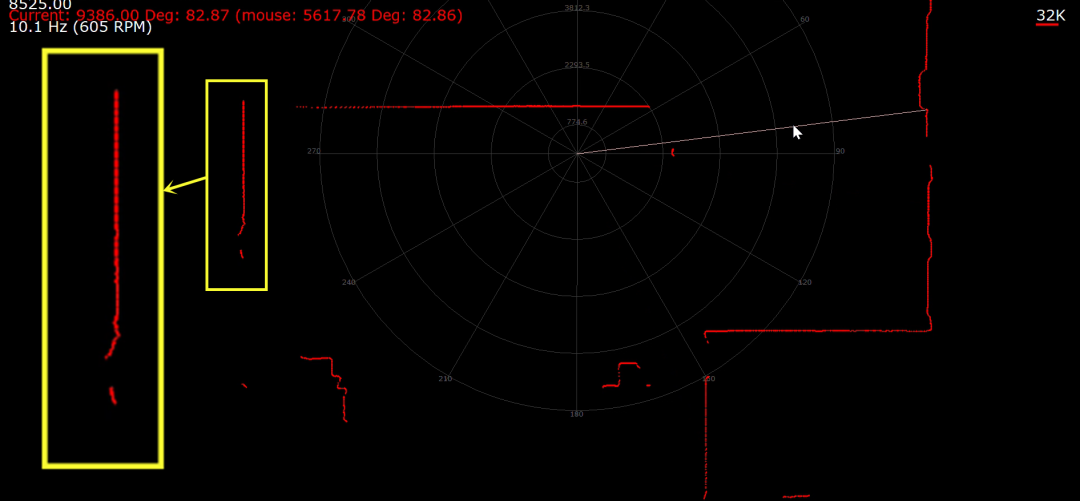
角分辨率是指两个相邻测点的角度,角分辨率越小,可扫描到的物体越小,点云越密集。思岚科技RPLIDAR S2拥有0.12°角度分辨率,对于一些细小、黑色物体的检测能力变强,让机器人更”聪明“。
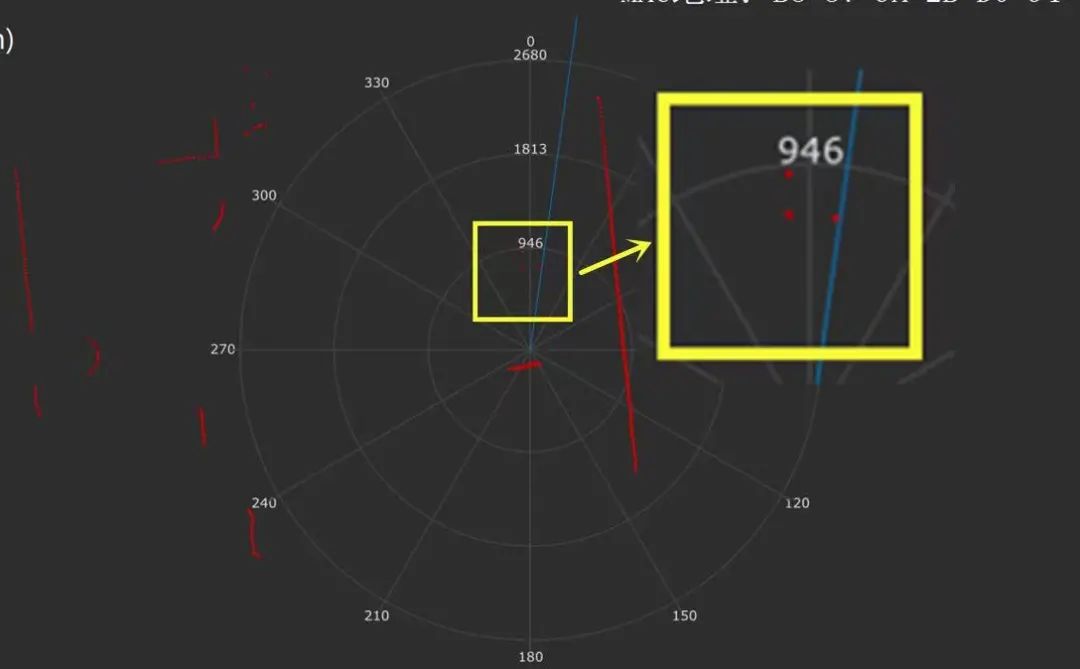
▲ S2,细小物体检测效果
►
防护能力
除了以上几个关键指标之外,激光雷达的防护能力也是一大重要指标,在实际的工作环境中,机器人常常会遇到室内强光源、室外强阳光、室内水雾等工作环境。所以雷达的防护等级也尤为重要,是机器人能否在这些环境下工作的一个硬性保障。
目前,RPLIDAR S2不仅做到了在室外80K lux阳光下可以正常工作,封闭式外罩,让其防护等级向IP65看齐,有效抵抗水雾环境,满足机器人各场景使用。
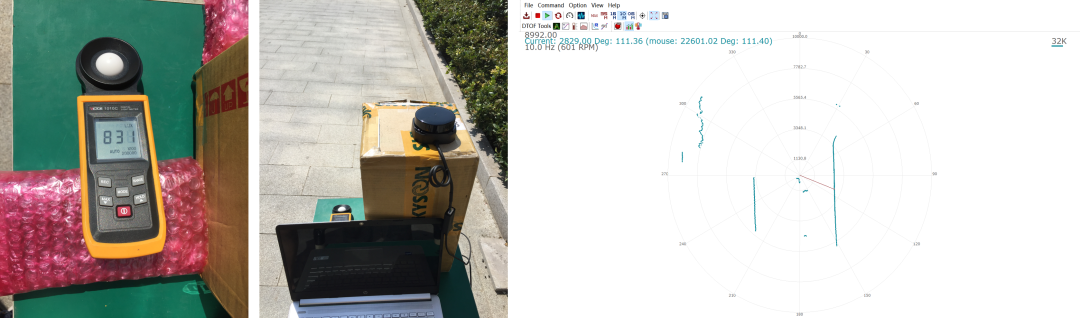
▲ S2在室外80K lux阳光下正常工作
以上这些,都是识别一款雷达是否符合应用的参数指标。下期,小岚将会从“冰山下的一角”入手,为大家持续揭开一款好的激光雷达产品,还要看哪些指标,敬请期待~
审核编辑 :李倩
下一篇:我国研制出异形激光焊接机器人





 关注微信
关注微信