时间:2018-08-10 09:38
人气:
作者:admin
通过示教器【COORD】选择合适的坐标:
JOINT(关节坐标),JGFRM(手动坐标),WORLD(全局坐标)
TOOL(工具坐标),USER(用户坐标)
图1:
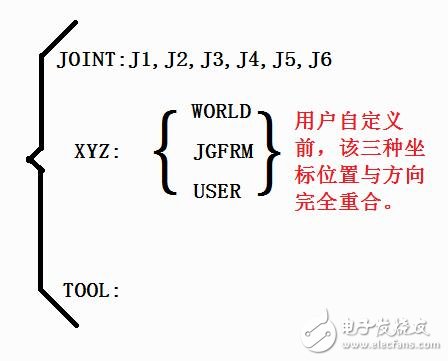
图2:
(特别提醒:必须在手动模式下才能进入工业机器人工作区域,注意自身人身安全)
图3:
1、手拿示教器站在工业机器人正前方(如图3所示)。
2、面向工业机器人,举起右手于视线正前方摆手势(如图2所示)。
3、由此可得:中指所指方向即为全局坐标X+;
拇指所指方向即为全剧坐标Y+;
食指所指方向即为全局坐标Z+。
在ABB工业机器人中也可以称为:世界坐标系
也有些工程师称之为:基坐标
图4:
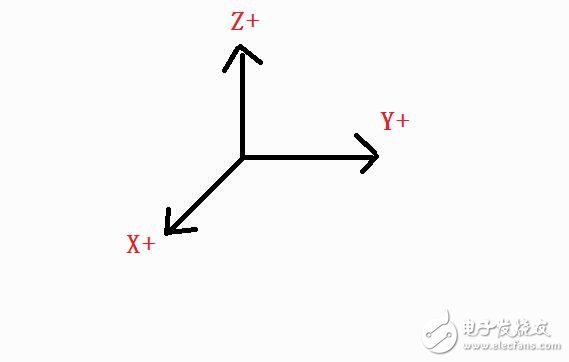
如图4:上图即为右手定则所得基坐标XYZ的正方向。





 关注微信
关注微信