时间:2018-03-21 10:01
人气:
作者:admin
1)机器人实时tcp速度可以通过系统模拟量输出。
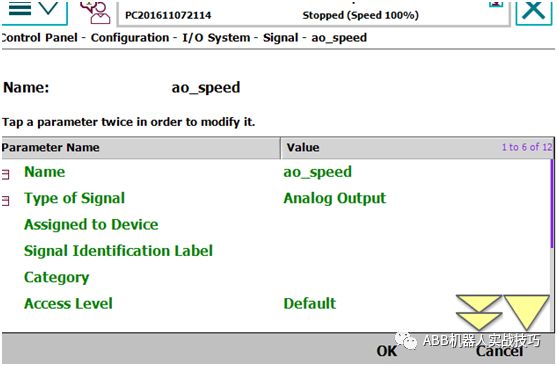
2)控制面板,配置,signal里新建模拟输出如下(举例为虚拟AO,也可以建立诸如DSQC651真实模拟输出)
3)
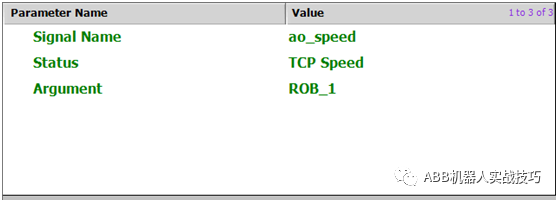
4)关联次信号到系统输出
5)在控制面板,配置的system ouput里新建,信号名为刚建立的模拟输出,status选择TCP Speed
6)
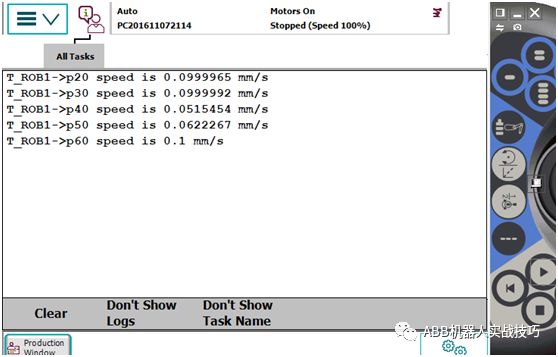
7)此时测试,可以通过模拟量ao_speed获得机器人的实时tcp速度。在一些和机器人速度有关的工艺上可以使用该信号。
8)想在机器人运行到某些位置时,也实时写屏速度,如何实现
9)可以通过MoveLSync语句来实现
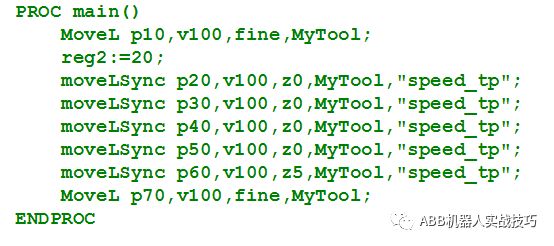
10)MoveLSync和MoveL语句相同,语句末加入机器人到达位置时调用的程序,该程序内不能有运动指令。如果使用zonedata,则机器人到达最接近设置位置时调用程序,类似triggerIO的提前距离为0.
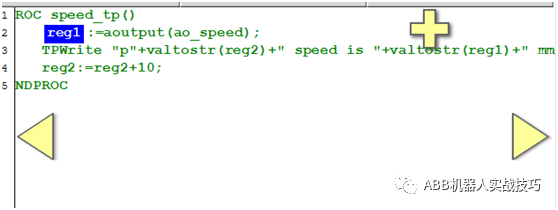
11)Speed_tp程序如下。即先获得实时速度,然后写屏。
12)
上一篇:ABB机器人如何创建数组





 关注微信
关注微信