时间:2016-09-19 14:34
人气:
作者:admin
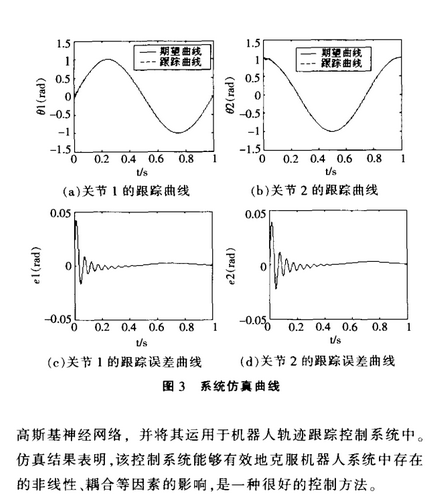
采用高斯函数作为模糊隶属函数,将模糊控制与神经网络相结合。利用神经网络实现模糊推理,运用了一种模糊高斯基函数神经网络.并用于两关节机器人的轨迹跟踪控制。仿真结果表明,该网络对机器人轨迹跟踪控制具有很好的效果,是一种行之有效的控制方法
引言
随着机器人技术与控制技术的发展,机器人在日常生活和工农业生产中得到广泛应用。机器人对象是一个非线性、强耦合的多变量系统,在运动过程巾.由于存在摩擦、负载变化等不确定因素,因而它还是一个时变系统.
传统的机器人控制技术大多是基于模型的控制方法,无法得到满意的轨迹跟踪效果,模糊控制和神经网络等人工智能的发展为解决机器人轨迹跟踪问题提供了新的思路。普通模糊控制的控制规则大部分是人们的经验总结.不 具备自学习、自适应的能力,往往还受到人的主观性的影响.因此不能很好地控制时变小确定的系统。由于神经网络具有良好的自学习、自适应、联想等智能,能适应系统复杂多变的动态特性.模糊控制和神经网络的结合成为学者研究的重点。利用神经网络非线性映射、自学习能力来渊整模糊控制.使模糊控制具有一定的自适应能力,同时也使神经网络获得了模糊控制的推理归纳能力。本文对模糊神经网络在机器人控制中的应用进行研究,提出了一种模糊高斯基神经网络的机器人轨迹跟踪控制。仿真结果表明,该控制方法能很好地对机器人轨迹进行跟踪。
上一篇:机器视觉原理解析及典型解决方案





 关注微信
关注微信