时间:2012-06-11 09:53
人气:
作者:admin
1 前言
由于世界上日趋严重的能源危机,发光二极管(LED)作为一种高效率光源得到了高度重视,不仅消费电子产品中的手机、PDA、液晶电视等的背光光源中已普遍应用白光LED,在公共交通信号标志,工业通信照明系统、汽车灯具以及用量巨大的普通工业与民用照明领域也将获得广泛应用。作为光源,LED的优势主要体现在三个方面:节能、环保和长寿耐用。首先,LED的能耗理论上仅为白炽灯的10%,荧光灯的50%;在使用寿命方面,LED是利用固体发光,耐震、耐冲击、不易破碎,预期寿命可达10万小时。在环保方面,由于在生产环节中不使用汞等易污染物,废弃物可回收无污染。
LED应用中的一个技术关键是提供与其特性相适应的电源或驱动电路。在照明应用中,现今的高亮度白光LED的工作电流可达150mA~3A,导通压降高达3~5V,以提供更高的亮度。由于功率的增加,传统的电阻限流,线性调节,电荷泵的驱动方法的效率受原理的限制已无法进一步提高,PWM开关电源型的直流变换器就成为首选的LED驱动解决方案。本文提出一种应用于升压LED驱动电路的控制器的芯片,考虑到LED是典型的电流型器件,电流的波动会影响其发光效率和色彩,而电流超过额定值将损害其寿命与可靠性。因此,在LED驱动中电流模式控制具有明显的优点。而且PWM控制技术发展至今,其电流控制模式也已发展出多种模式。相对于环路设计较为复杂的平均电流控制模式和电磁干扰问题较多的迟滞电流控制模式,峰值电流控制模式环路设计较为简单,且可以有效地限制电流。
考虑到上述因素,芯片在设计中采用了峰值电流控制模式,并集成了斜坡补偿电路,使之具有较宽的电压工作范围(3~16V)。本文首先给出了整个控制系统的建模与环路补偿设计,接下来针对LED调光的要求在传统的峰值电流模式控制器模块的基础之上设计数字调光功能的模块。第三部分介绍了芯片中的无采样电阻的控制功能电路,实现直接通过采样功率开关管漏源电压,即Rds(on)采样来采样电流,减少了采样电阻上的损耗,可以有效地提高系统的效率。最后给出控制芯片的系统结构、版图和各种模式下的测试结果。
2 系统建模与环路补偿设计
升压型LED驱动电路以及控制环路图如图1所示。通过电阻Rs1采样负载LED电流输入电压误差放大器(EA),误差放大器的输出经过补偿网络输出作为电流峰值比较器的基准,电阻Rs2采样开关管S1上的电流输入比较器的正端,Ramp是峰值电流控制中的斜坡补偿电流。时钟信号CLK确定开关频率与开关管的开通,当电流信号大于设定的阈值时,比较器的输出变高触发逻辑电路翻转开关管关断。
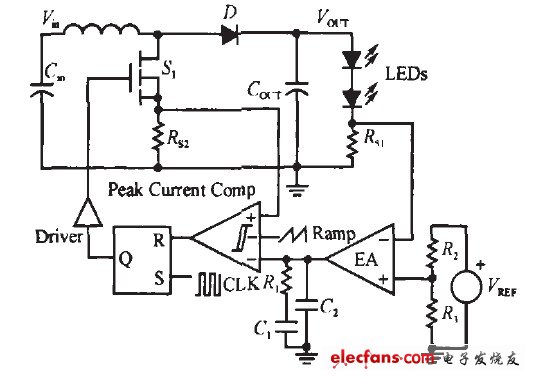
图1 升压型LED驱动电路控制图
可建立如图2所示的小信号模型电路。对于升压型的功率级电路,利用状态空间平均法可以得到原功率级两个重要的传递函数Gvd(s),Gid(s)并根据图中模型可以推导出输出电压对指令电流信号的等效功率级传函Ap(s)。
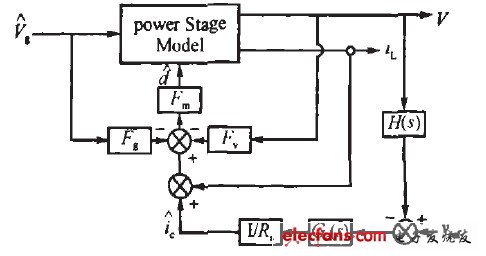
图2 峰值电流模式控制小信号模型

其中Fm=1/MaTs,Fv=D‘2Ts/2L,Ma是斜坡补偿电流的斜率,L是滤波电感,Ts是开关周期,D是稳态占空比。考虑整个环路的传递函数T(s);
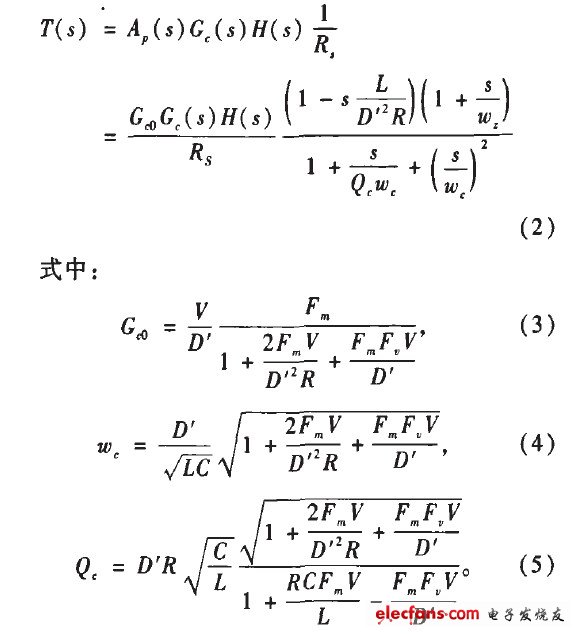
补偿前的环路传函幅相频曲线如图3中所示,系统有两个极点(p1,p2),一个左半平面的零点z(输出电容ESR引起),一个右半平面的零点z1.这里需要指出的是,如果没有带斜坡补偿电路的电流反馈控制系统的引入,输出LCR网络决定环路系统是一个高Q值的系统,而电流反馈使得系统的Q值大大地减小,但右半平面的零点会提高穿越频率并使得相位裕度更差。可以采用的补偿方法是加入一个单零点单极点的补偿网络如图3所示,Gc(s)表达式为,
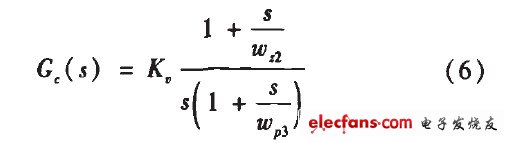
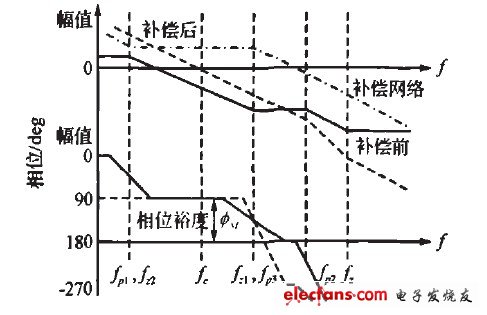
图3 补偿前后系统开环频率响应
其中z2用来补偿极点p1,坐标原点的极点可以提高低频的环路增益以较小直流稳态误差,p3抵消z1带来的幅度增加,抑制接近开频频率的噪声,最终的穿越频率fc设定在开关频率的1/10左右。最简单的补偿方法也可以采用单极点的补偿网络,为保证相位裕度就会带来缺点即环路的带宽会更小,系统动态响应变慢。对于实际应用的升压型的LED驱动电路进行建模并在MATLAB中仿真结果(如图4所示),从仿真的结果看,环路在这种斜坡电流和补偿网络设计下在穿越频率附近的相位裕度大于45°,系统是稳定的,与公式推算的结果基本相符。
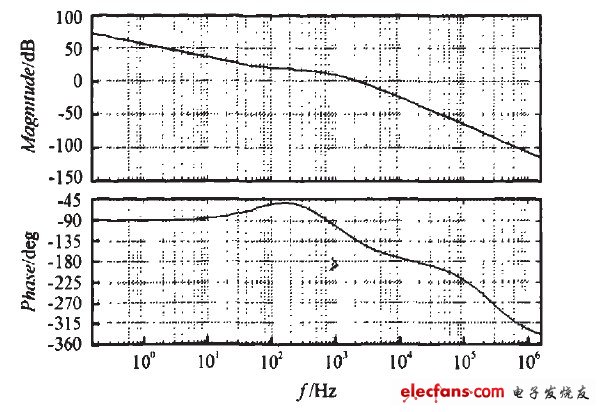
图4 MATLAB仿真结果

 关注微信
关注微信