时间:2016-12-09 11:31
人气:
作者:admin
北京时间12月9日消息,据外媒报道,作为首批能够证明苹果正在研发自动驾驶汽车的文件之一,美国专利商标局在周四公布了苹果的一份专利申请文件。该专利描述了一个基本防撞系统,未来可能会成为自动驾驶汽车遥测解决方案的基础。
苹果的专利名为“任意多边形障碍物的避让”,它能够证明苹果正在研究机器学习和计算机视觉在自动驾驶汽车方面的应用。
这项专利为机器人行业(自动驾驶汽车出自这一领域)设计,它披露的系统和方法详细阐述了一种基本防撞技术,能够在事先不知道环境内物体的情况下成功导航。特别需要指出的是,这个系统能够在2D和3D环境下运行,对于计算机视觉系统来说这是一项艰难的任务。
苹果自动驾驶汽车防撞系统专利
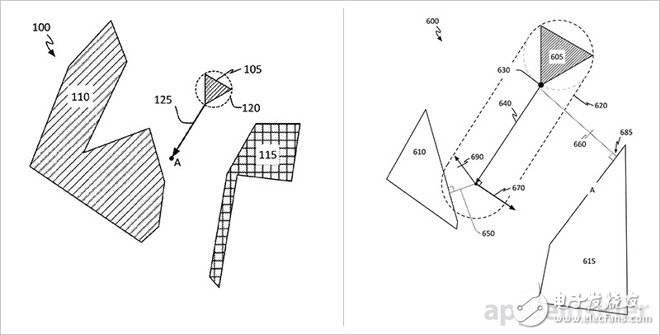
苹果的技术可以用于避让凹面体和凸面体,不管障碍物是在移动还是静止。对于自动驾驶汽车来说重要的是,避让机制能够进一步利用简单的几何图形来识别障碍物边缘,这是自动驾驶汽车最容易碰撞的地方。
自动驾驶汽车系统往往会受到预判未来空间位置的能力,以及摄像头或者其它感应硬件运营视野的限制。提升这两项指标的能力需要先进的光学技术,高性能处理器以及复杂的侦测和避让算法。
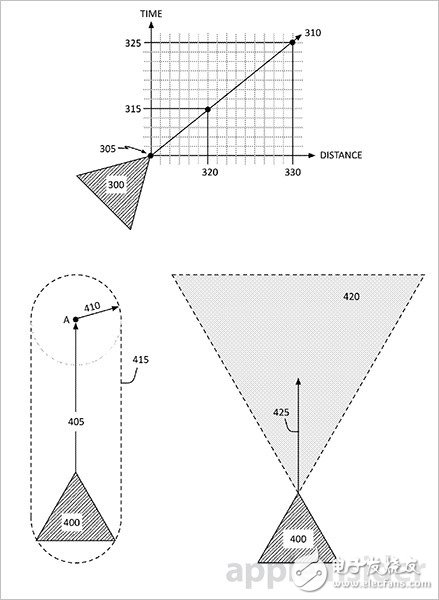
专利显示,苹果防撞系统寻求减轻一些计算量,方法是首先确定当前位置和基本运动矢量。苹果的系统能够以每秒60次的速度检查周围环境,从而侦测到多个迎面而来的障碍物,甚至与每个障碍物边缘的距离。潜在碰撞将通过比较障碍物边缘距离与已知包围半径(bounding radius)来确定。
苹果自动驾驶汽车防撞系统专利
如果障碍物边缘被确定位于系统包围半径之外,那么汽车就会获准继续按照原定路线行驶。如果系统预测到可能会发生碰撞,它就会选择与当前位置最接近的边向量,并计算避让障碍物所需要的力。这一计算会考虑到汽车的质量、加速以及其他重要指标。
在避让第一个物体后,系统就会接着判断下一个障碍物,并吸收从前一次避让障碍物中学习到的数据。
在收缩了开发全功能自动驾驶汽车的秘密计划后,苹果据称正在开发自动驾驶系统。就在最近,苹果向美国国家道路交通安全管理局发出提议,请求政府放宽行业新公司测试自动驾驶汽车的规定,暗示苹果未来可能打算对自动驾驶汽车实施路测。
苹果的防撞系统专利申请在2015年6月提交,发明者包括布鲁诺·索莫(Bruno M. Sommer)、诺曼·王(Norman N. Wang)等。



 关注微信
关注微信