时间:2016-11-11 10:18
人气:
作者:admin
双目视觉ADAS芯片-S32V234
S32V234采用了4颗ARM Cortex A53作为核心CPU,以获得更高的性能功耗比。利用一颗ARM Cortex M4作为片上MCU,用于关键IO(如CAN-FD)的实时控制,并支持AutoSAR操作系统。芯片内部包含可编程的图像信号处理器(ISP),所以配搭的图像传感器可以输出raw data,从而降低物料成本,节省空间尺寸。
另外,芯片还包含了两个名为APEX2CL的视觉加速引擎。每个APEX2CL拥有64个本地计算单元(CU),并配有本地内存和专用DMA,通过SIMD/MIMD(单指令多数据/多指令多数据)方式对图像识别过程进行加速。
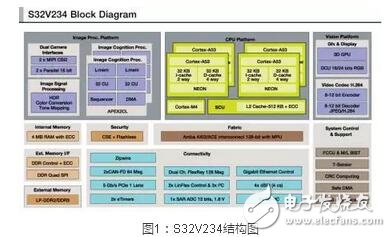
另外值得指出的是,考虑到ADAS系统对安全性和可靠性的严苛需求,S32V234在设计时加入了诸如ECC(错误检查与纠正),FCCU(故障收集与控制单元),M/L BIST(内存/逻辑内置自测)等多种安全机制,能够满足ISO26262 ASIL B~C的需求。
双目视觉ADAS的优势
相比于单目视觉,双目视觉(Stereo Vision)的关键区别在于可以利用双摄像头从不同角度对同一目标成像,从而获取视差信息,推算目标距离。具体到视觉ADAS应用来说,如果采用单目摄像头,为了识别行人和车辆等目标,通常需要大规模的数据采集和训练来完成机器学习算法,并且难以识别不规则物体;而利用毫米波雷达和激光雷达进行测距的精度虽然较高,但是成本和难度亦较高。
双目视觉的最大优势在于维持开发成本较低的前提下,实现一定精度的目标识别和测距,完成FCW(前方碰撞预警)等ADAS功能。
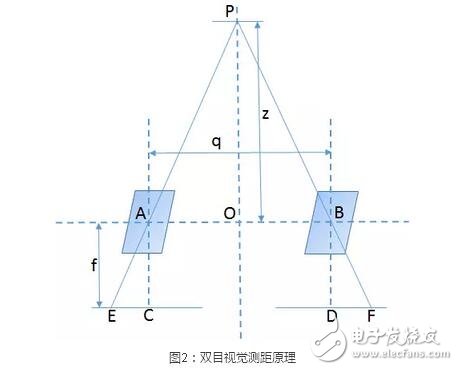
双目视觉测距的基本原理如图2所示:目标点P在两个相机中的视差为d=EC+DF,根据三角形的相似性,推导可得距离z=(fq)/d。其中焦距f和相机光轴距离q可认为是固定参数,所以求出视差信号d即可求得距离z。
双目视觉的测距步骤
相机标定
图像获取
图像预处理
特征提取与立体匹配
三维重构
其中,相机标定是为了得到相机的内外参数和畸变系数等,可以离线进行;而左右相机图像获取的同步性,图像预处理的质量和一致性,以及立体匹配(获取视差信息)和三维重构(获取距离信息)算法的实时性要求带来的巨大运算量,对在嵌入式平台上实现双目视觉ADAS提出了挑战。
上一篇:芯片巨头们的“芯”战场:智能汽车



 关注微信
关注微信