时间:2025-06-18 09:31
人气:
作者:admin
除了常见的手推式或骑乘式割草机,您或许还了解过智能割草机器人。传统的割草机需要借助人力来进行操作,但割草机器人是一种具备自主智能规划和实现自动化草坪修剪的智能设备,旨在替代人工完成草坪修剪任务。当下,割草机器人行业正处在爆发式增长的关键时期,它凭借着其高效率、减少劳动力、安全的特点,在欧美等庭院文化发达的国家盛行。
智能割草机器人中的电机驱动系统主要由行走电机驱动和割草电机驱动两部分组成,行走电机主要控制机器人的前进、倒退、转向等行动路径,而割草电机主要控制机器人的割草刀盘进行开启和关断。所以电机驱动系统中MCU(微控制单元)的稳定、可靠和精准度就显得尤为重要。
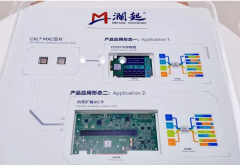
凌鸥创芯&晶丰明源推出一款专门针对智能割草机器人应用场景的无感FOC解决方案,采用LKS32MC45x系列MCU进行行走轮的控制和LKS32MC07x系列MCU进行割草刀盘的控制,配合增强型观测器和低速观测器,具备高集成、性能稳定等优势的整体解决方案。
行走轮方案详情
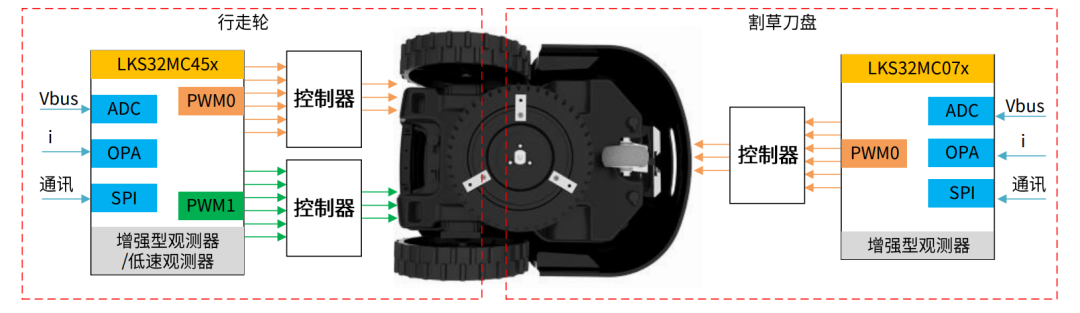
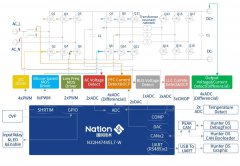
图1. 方案应用框图
单MCU双行走轮方案,该方案内置LKS32MC45x系列MCU
LKS32MC45x的主要特点
基于Cortex-M4F内核,最高主频可达192MHz
Flash:256KB,SRAM:40KB
两组增强型MCPWM,频率可达192MHz,支持两个时基
丰富的模拟外设:三组14Bit ADC模块,两组DAC,六组差分型运算放大器和六组比较器。
方案优势
性价比高:LKS32MC45x系列一拖二电机,强大算力+丰富的模拟外设可以让一颗LKS32MC45x MCU同时驱动两个电机工作,满足两个独立电机过流保护的需要,适用于智能割草机这种双电机应用场景。
算法丰富:无感FOC算法,观测器稳定(支持增强型观测器高速稳定,低速观测器低速带载强)
参数自整定:电流环:根据电机电阻、电感自整定参数;速度环:根据速度环带宽统一调节PI参数
自动弱磁:根据电压反馈法自动弱磁,算法稳定可控
过调制:稳定自适应的过调制策略,提高电压利用率
母线限流:支持母线限流,保护电池包
多种停机方式可选:关MOE/短下管/零电流/软刹
技术优势
两组PWM交替运行
两组PWM时基正交计数,192Mhz高主频支持M0与M1交替计算,采样互不干扰,观测器稳定收敛。
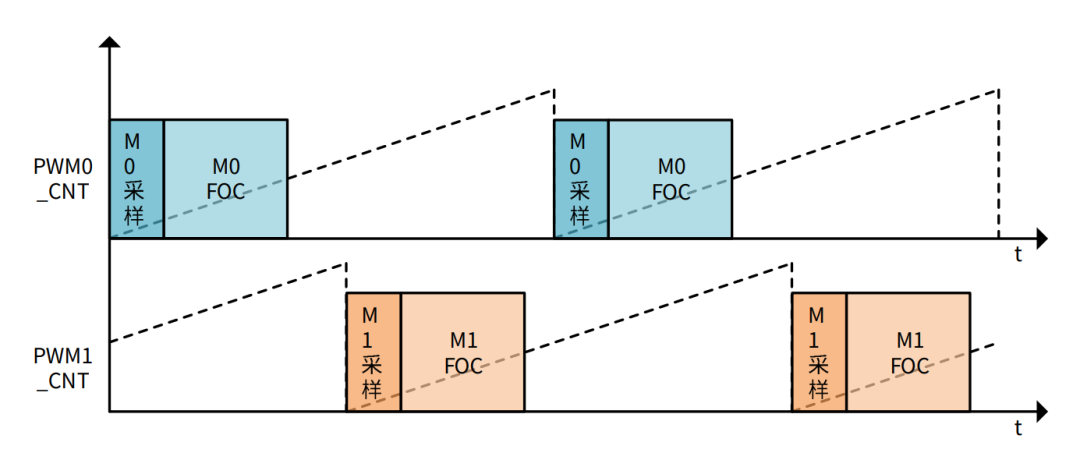
图2. 双PWM交替控制
母线限流
通过检测母线电流,计算实时功率,利用速度环限功率功能,限制母线电流为5A。
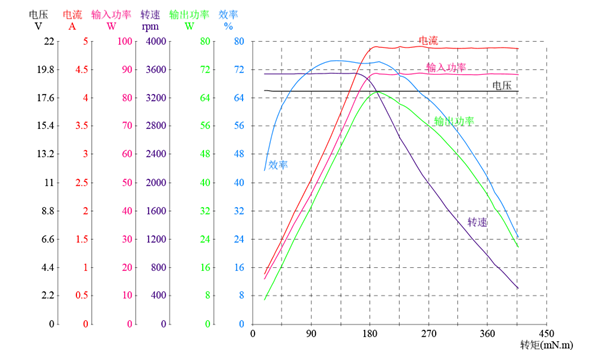
图3. 母线限流测功图
多种停机方式
关MOE:关断可靠,停机时间长
短下管:电流冲击大,停机时间短
零电流:电流可控,停机时间适中
软刹车:电流冲击小,停机时间可配
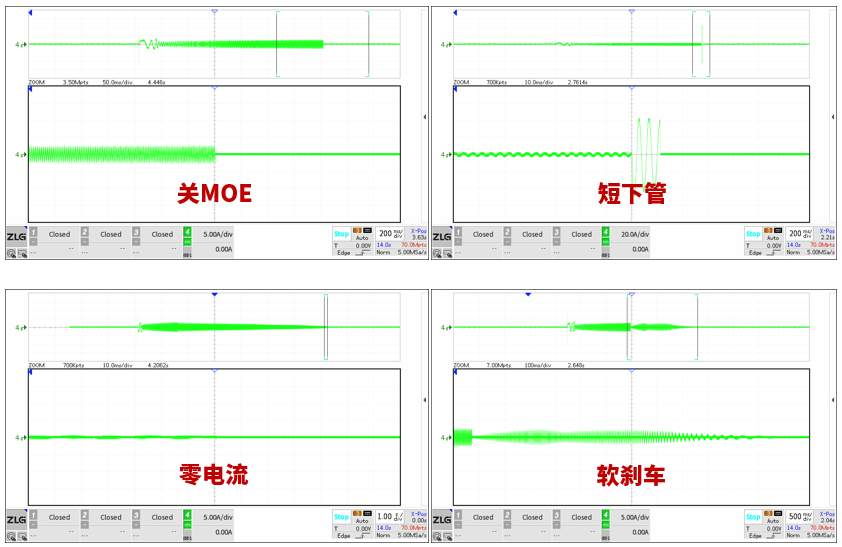
图4. 不同停机方式下电流
低速观测器
全程观测器闭环,大负载堵转时观测器收敛到极低速,低速带载能力强,推荐电频率<400hz。适用于低速工况,负载消失后立即闭环,观测器稳定工作。

图5. 低速观测器堵转工况
总结
本文重点介绍了凌鸥创芯&晶丰明源推出的智能割草机器人行走轮的高效驱动方案——基于LKS32MC45x的单MCU双电机无感FOC控制。该方案通过192MHz Cortex-M4F 内核及丰富的外设,以单芯片驱动双行走轮并支持独立过流保护;该方案已经在多个实际案例中量产,助力客户缩短开发周期。
此行走轮方案也为整机运动控制奠定高效基础,下一篇文章将深入探讨与之协同的割草刀盘驱动方案——基于LKS32MC07x系列MCU的割草电机精准控制技术。


 关注微信
关注微信