时间:2025-05-15 14:26
人气:
作者:admin
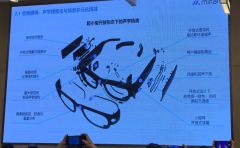
(2025年5月15日)在智能机器人领域,运用视觉算法和能力处理室外工作长期面临挑战。据官方报道,全球领先的AI解决方案提供商广和通和具身智能行业应用与技术创新引领者云深处科技合作,广和通利用自研双目视觉模块RV-BOT为云深处科技四足机器人打通室外工作链路。通过深度融合广和通自主研发的双目视觉算法,RV-BOT将显著提升了室外场景中的定位精度,为国产足式机器人的自主导航与智能化应用开辟了新路径。

四足机器人在侦查巡检、抢险救灾等复杂室外环境中,常因依赖单一传感器而出现定位偏差或数据缺失,定位稳定性不足。广和通的双目视觉算法通过以下创新设计攻克了技术难点:
多模态数据融合
算法结合双目摄像头,实现视觉特征点匹配与卫星定位数据的实时校准。即使在卫星信号受限区域,仍可通过实时补偿确保厘米级连续定位。
动态环境自适应
采用深度学习优化的立体匹配模型,可以识别典型多径干扰模式,结合视觉语义信息和运动学解算,动态修正RTK定位偏差,增强复杂场景下的定位鲁棒性。
边缘计算优化
依托广和通端侧AI部署能力,算法在本地完成实时图像处理,显著降低延迟,保障机器狗响应效率与安全性。
搭载广和通双目视觉算法的云深处机器狗,未来将在多个领域展现出适应性优势:
工业巡检:在非结构化地形中,机器狗通过多模视觉定位自主跨越障碍,精准识别设备状态,提升巡检任务的可靠性与覆盖范围。
灾害救援:在复杂灾害现场,双目视觉的深度感知能力将赋能机器狗,协助救援人员在灾后废墟和易塌建筑物、化学污染及泄露有毒、缺氧等环境下开展侦查工作。
城市服务:在高动态人流环境中,算法将预判移动障碍物轨迹,实现安全自主物资运输及其他作业。

试运行中的DEMO
行业价值:推动具身智能与机器人技术演进
广和通双目视觉算法的应用,为足式机器人室外定位提供了新思路。其端-云协同架构支持算力优化,使机器狗能在有限功耗下运行复杂视觉算法,并为后续功能扩展奠定基础。
相关人士指出:“双目视觉与运动控制的深度耦合,让机器狗从单一执行工具转变为环境交互智能体。未来将进一步探索更多视觉算法融合方案,推动机器人在更广泛场景中的落地应用。”
此次合作凸显了AI视觉算法与机器人硬件的协同创新潜力。随着广和通在AI与机器人领域的持续深耕,以视觉为核心的感知技术有望加速智能机器人在各行业的普及与深化应用。




 关注微信
关注微信