时间:2023-06-20 10:46
人气:
作者:admin
VR眼镜是一种虚拟现实头戴式显示设备;近年来,随着元宇宙的火爆。虚拟现实技术一直被视为元宇宙的钥匙,可以通过创造沉浸式和交互式的体验,为用户带来全新的感官刺激和认知拓展。
然而,传统VR头戴式设备厚重的机身使得它的应用场景也在受限。为此,生产商绞尽脑汁不断得提升它的轻便度,因此对于设备的组装配件和工艺要求也非常精细。那么,明治传感器在其中能有什么样的作用呢?本期小明就来跟大家分享一下明治传感在VR眼镜外壳生产中的高精度测量案例
检测场景
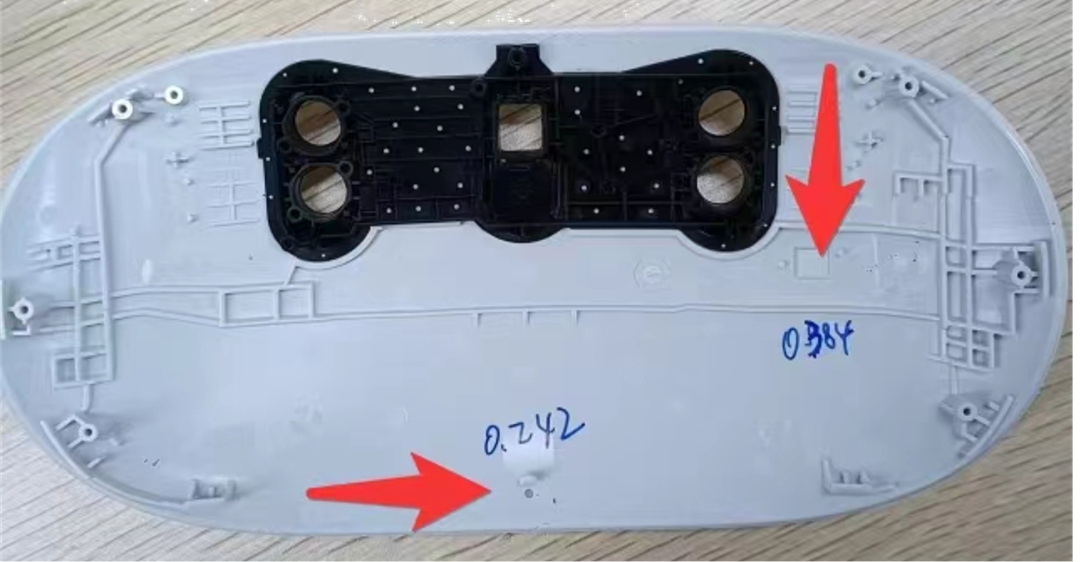
1、需要检测图中两个红色部分的深度(一个为圆孔 一个为方型凹槽);
2、标准件的深度分别为图示0.242mm、0.384mm;检测精度要求为0.01mm,要求当测量结果不在标准件范围内,传感器发出信号驱动设备进行不良品处理
解决方案
采用光谱共焦位移传感器,通过确定一个基准点,再对目标位置进行单点检测高度的方式计算深度。

1、圆孔测量:以圆孔边缘为基准Z1,直接测量圆孔中心的高度H1,计算高度H1与基准Z1的差值得到圆孔的孔深值S1。
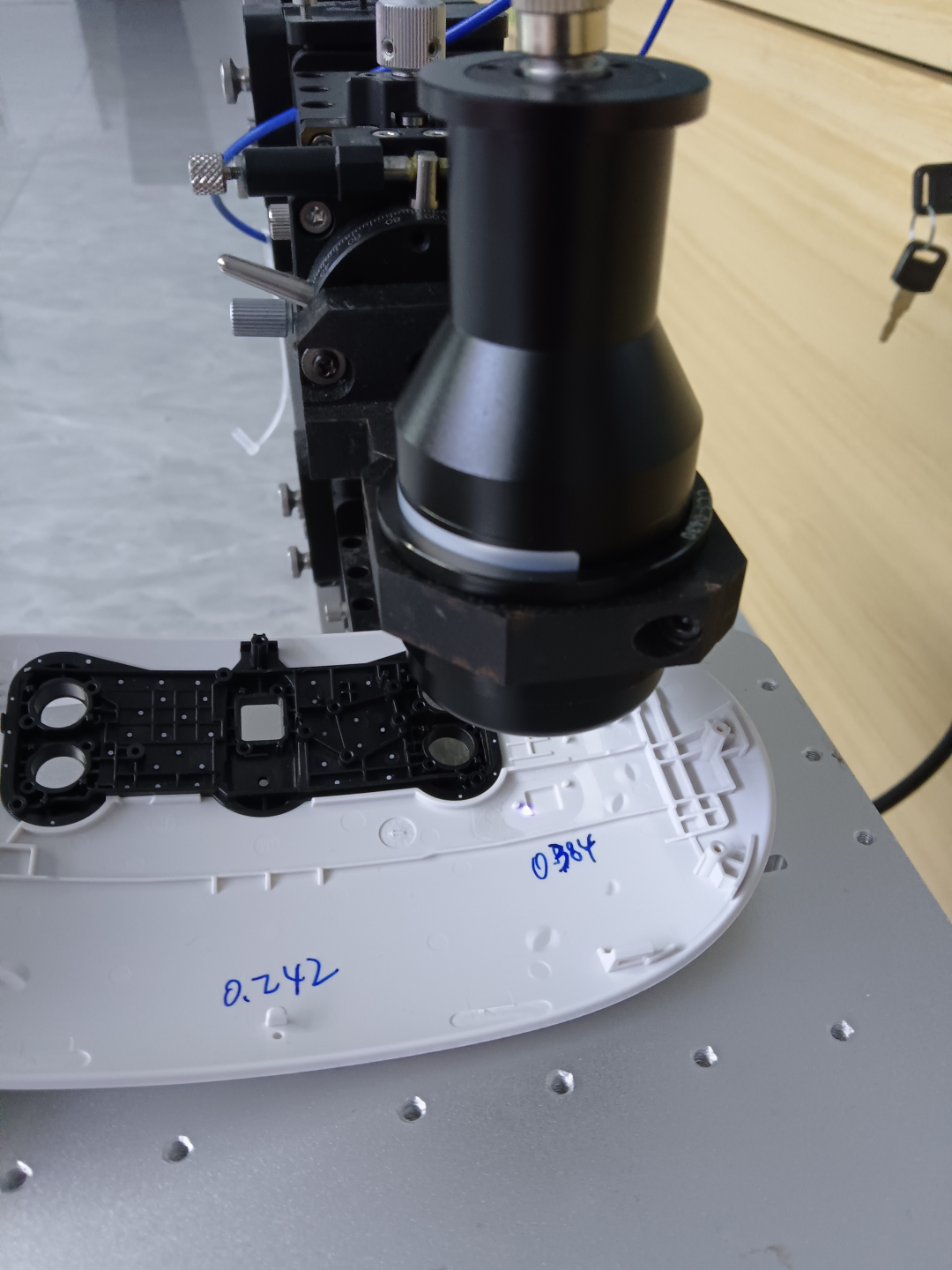
2、方形凹槽测量:以凹槽外边缘为基准Z2,测量该边缘靠近的凹槽内边缘高度H2,计算高度H2与基准Z2的差值得到方形凹槽的深度值S2。
3、检测过程中,应注意尽量保证被测量处的水平状态,避免因工件倾斜造成测量结果的过大误差。
光谱共焦传感器是一种通过光学色散原理建立距离与波长间的对应关系,利用光谱仪解码光谱信息,从而获得位置信息的装置。
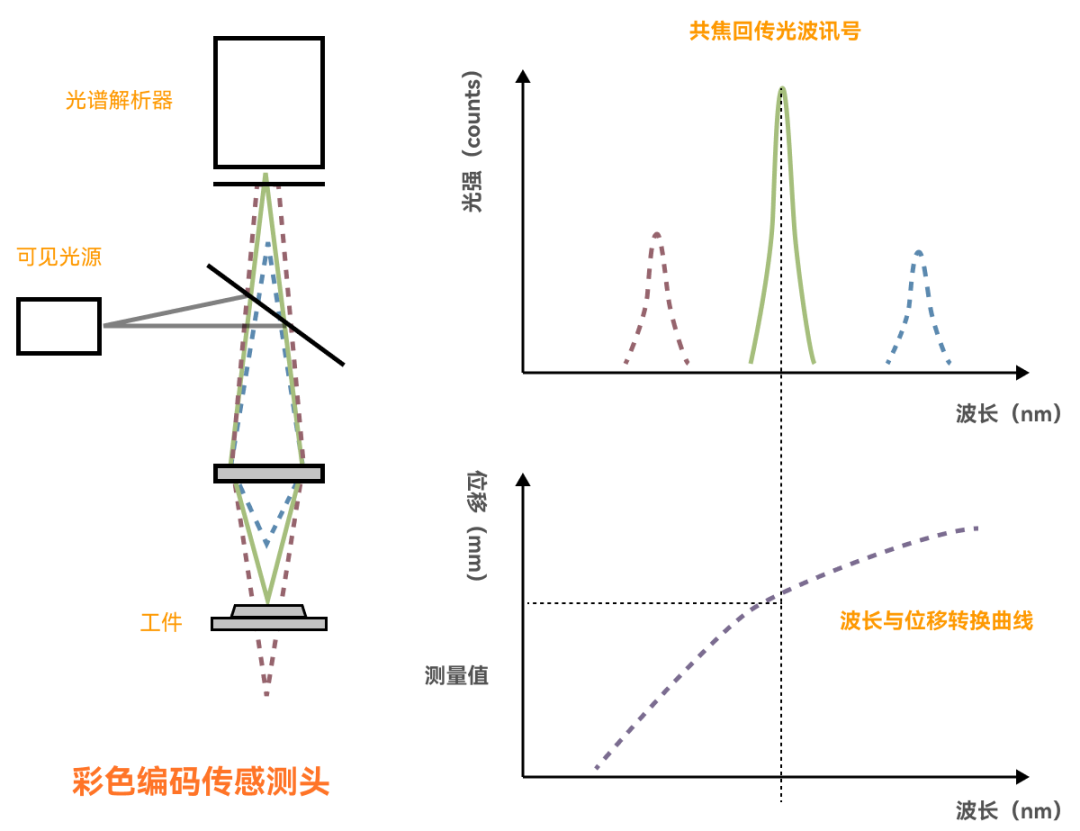
如上图所示,白光LED光源发射出一束宽光谱的复色光,通过色散镜头发生光谱色散,其中只存在某一特定波长的单色光聚焦在被测物体表面,并同时反射回光学系统。经过光谱分析得到该单色光波长值,由波长-距离标定即可换算出被测物体的距离值,还可进一步通过计算位移数值获得平面度数据和厚度数据等。
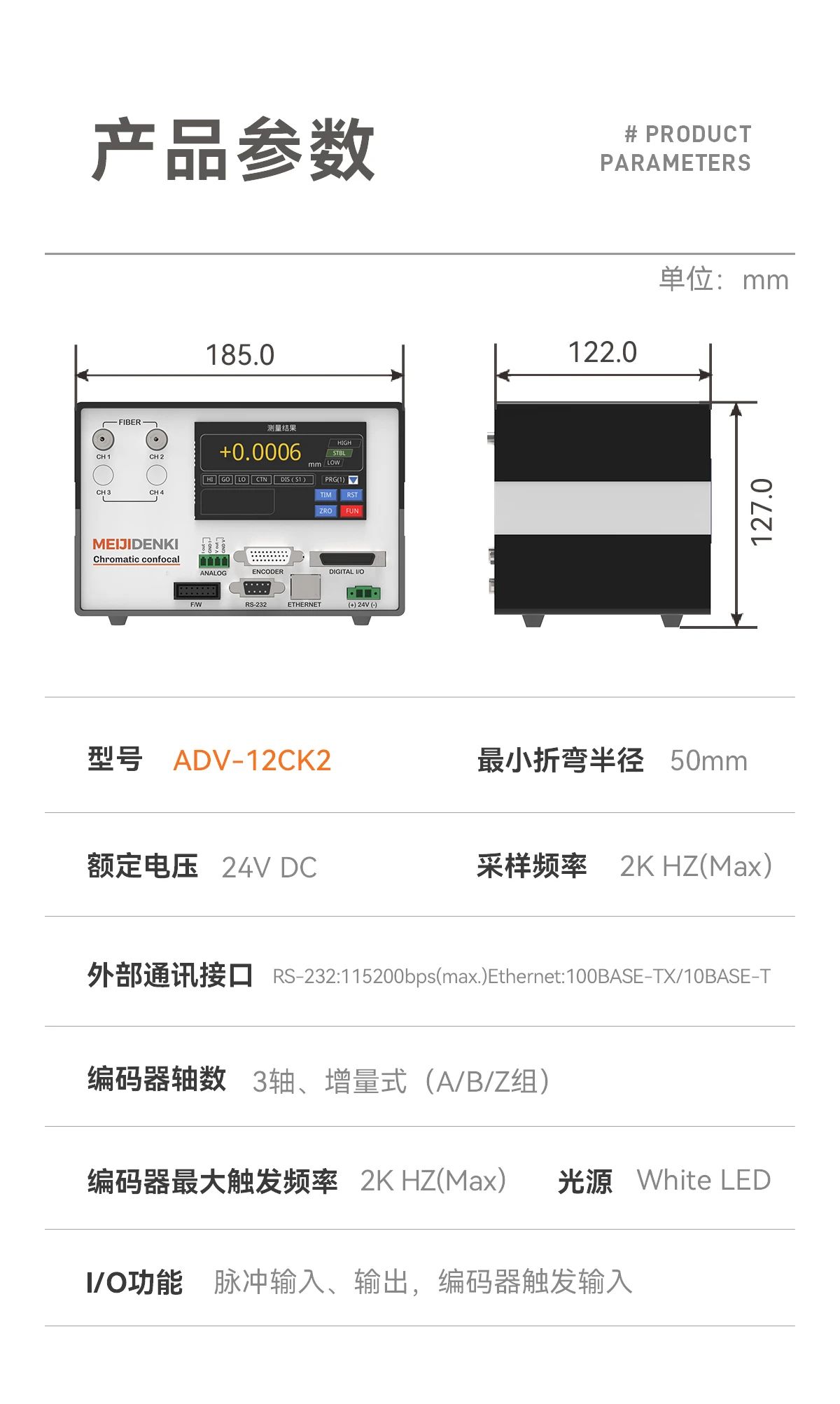
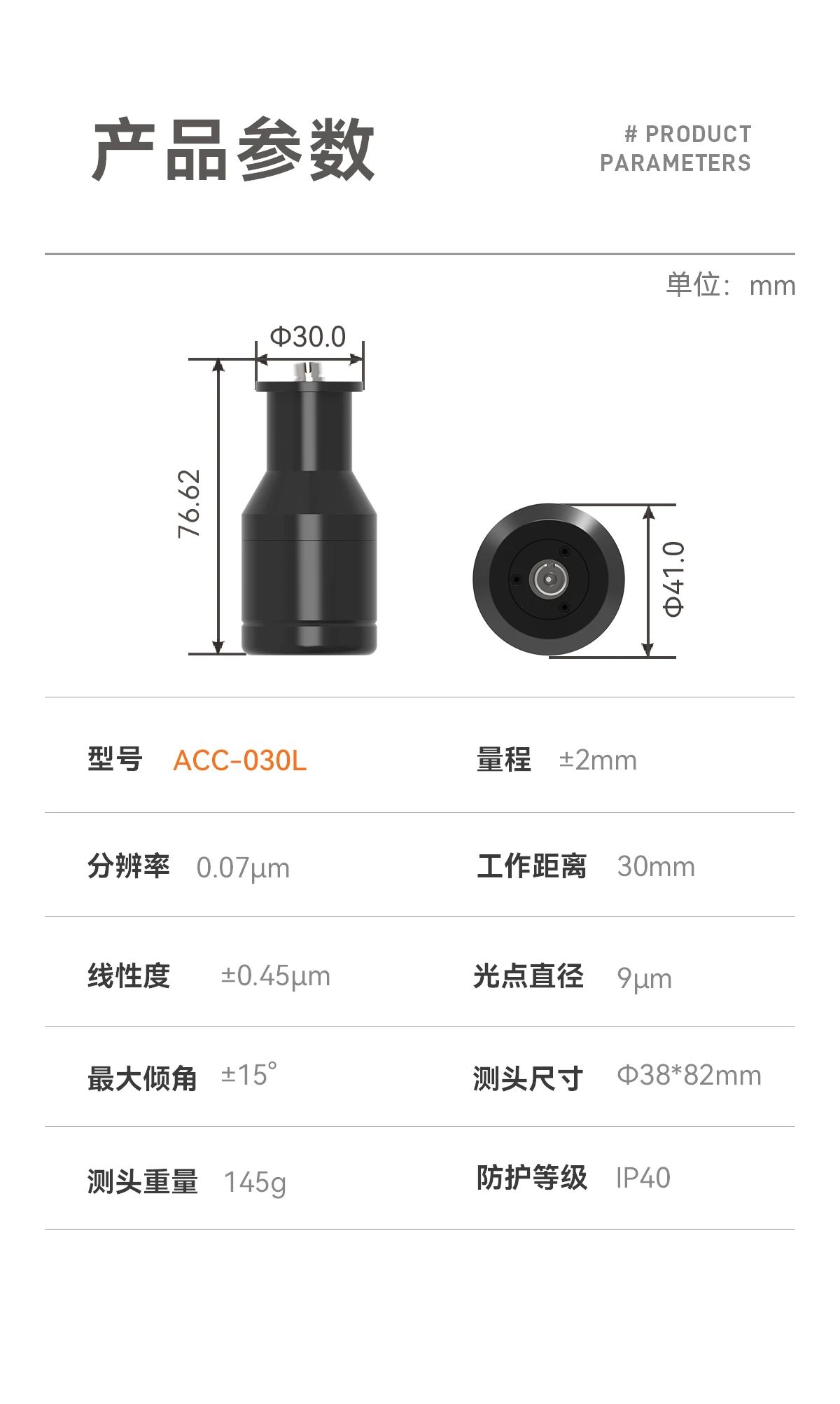
产品参数




 关注微信
关注微信