时间:2023-04-06 17:01
人气:
作者:admin
激光跟踪仪的机器坐标系是不固定的。
激光跟踪仪是采用球坐标系测量系统,在测量的时候,是需要操作者手拿测量靶球,激光跟踪仪射出一道激光主动跟踪测量靶球,在操作者将靶球接触待测工件表面时,激光跟踪仪精确采集该点的三维坐标并上传至测量软件,通过在工件上采集若干点,即可在软件上根据采集的点位坐标,拟合成需要的点、线、面、球等特征,分析拟合的特征,可得到对应的形位公差数据,也可将工件的三维模型导入测量软件,进行实物与数模的三维比对,得到三维比对数据,从而分析出实物与设计状态的差异,实现精准检测。
RobotMaster机器人检测校准套件
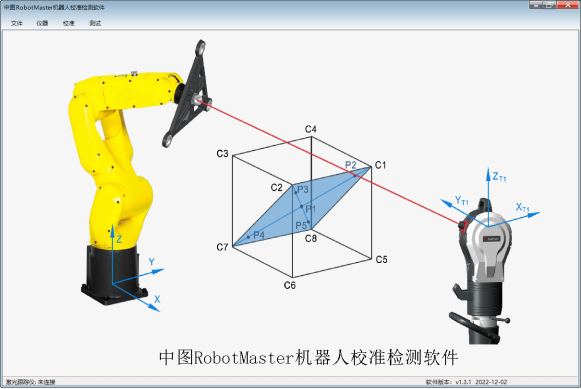
基于GTS激光跟踪仪的RobotMaster机器人套件为工业机器人空间绝对位置精度测量标定和性能检测提供高效可行的解决方案,既提供基于光学靶球的经济方案,也提供基于6D姿态智能传感器的增强方案。
●机器人标定校准软件
根据机器人的D-H参数建立机器人校准数学模型,进行机器人零位校准,机器人D-H参数校准,机器人TCP中心点精度校准。在不改变现有机器人任何结构和硬件尺寸的条件下,通过机器人校准标定软件有效的提高机器人绝对位姿精度。
●机器人性能检测软件
按照ISO 9283工业机器人性能规范及其实验方法完成机器人性能检测,检测内容包括:
机器人位姿准确度、位姿重复性、多方向位姿准确度变动、距离准确度、距离重复性、位置稳定时间、位置超调量、位姿特性漂移、互换性、轨迹准确度、轨迹重复性、拐角偏差、轨迹速度特性、静态柔顺性等。
上一篇:吻合器包装剥离强度测试仪




 关注微信
关注微信