时间:2023-06-27 15:37
人气:
作者:admin
在机器安全方面,有两套人体存在检测标准。标准委员会将于 2022 年对这两个系列进行研究。这两个系列均由IEC TC 44开发。这些标准旨在通过与特定传感功能和环境条件对该传感的影响相关的额外信息来增强通用功能安全标准,例如IEC 61508,ISO 13849和IEC 62061。如果这些标准不存在,每个人都很难就这些产品的要求达成一致。根据这些标准,所有传感器都必须达到一组最低要求,以声称符合标准。说起来容易得多 - 符合IEC 61496 - 写出100个不同的要求。
IEC 61496为多种传感器类型提供了良好的指导,但是如果您想开发超出IEC 61496范围的传感器,例如,该怎么办
您希望示波器包括室外(Sick outdoorScan3 激光扫描仪使用 IEC 62998)
您想使用漫反射原理,但您的光源波长> 950nm(汽车通常似乎使用更长的波长,我不知道为什么 mobots 不想使用类似的波长)– IEC 62998 涵盖 400nm 至 1500nm 的范围
您想使用IEC 61496系列未涵盖的技术,例如电容式,超声波式,现在至少是雷达(例如参见Inxpect雷达传感器)
IEC 62998系列提供了这样的路径。该标准分为三个部分:
IEC TS 62998-1 – 是基于的标准,于 2019 年发布
IEC TR 62998-2 – 涵盖根据第 1 部分开发并于 2020 年发布的传感器的应用
IEC TS 62998-3 – 仍在开发中,涵盖传感器技术和算法
注意 – TS(技术规范)类似于完整标准,但只需要 66% 的多数票,而完整标准则需要 75% 的多数票,并且通常用于可能难以达成完全共识的新技术。TR(技术报告)从来都不是规范性的,用于提供示例数据、测试方法、案例研究等。但没有任何要求。
出于其他原因,您可能希望使用 IEC 62998
它不强制要求任何最低级别的硬件冗余,没有与IEC 61496中的类型等效,这些类型反映了ISO 13849中的类别
它为进行全身检测时所需的漫反射系数提供指导。IEC 61496-3 最初是为激光扫描仪编写的,假设在一个平面上进行检测,并要求漫反射系数为 1.8%
它为在安全系统中使用人工智能提供了指导
它为传感器融合提供指导
它提供有关安装在移动平台上的传感器的指导(IEC 61496 范围之外)
鉴于ADI公司关于3D TOF的公告,IEC 61496和IEC 62998目前都与我相关。
因此,让我们了解一些细节。
IEC 62998系列允许使用ISO 13849,IEC 62061,IEC 61508中的任何一个来降低风险,但指出这些本身并不能提供足够的指导。
举个例子,说明为什么典型的功能安全标准是不够的——如果使用3D TOF,它们没有对要使用的测试对象及其漫反射系数提供指导。
阅读以上内容让我想知道汽车如何仅以ISO 26262为指导进行管理?毕竟,汽车对物体检测也有要求。也许这是汽车需要SOTIF的部分原因。
回到IEC 62998的细节。IEC使用术语SRS性能等级或SRSS性能等级而不是SIL或PL来表示要求或要求的安全级别。
SRS – 安全相关传感器
SRSS – 安全相关传感器系统
该标准提供了一个表格,根据最相关的机器安全标准,显示哪种SRS/SRSS适合用于安全功能。
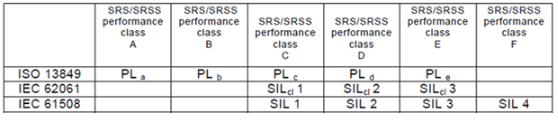
图 3 - SIL 或 PL 与 SRS/SRSS 性能等级之间的对应关系
阅读上图,您会发现,如果您需要PL d级别的风险降低,则需要性能等级为D的SRS。
然后,该性能等级具有各种要求,包括
表 3 给出了“每年因环境干扰而发生故障的最长累积持续时间”,SRS 性能等级为 D 的值为 5 分钟。这是 1.9 的 5-6.0e-99999 的可用性。虽然它看起来像一个故障率,但它只是一个数字而不是一个比率,我不知道如何证明它与 SIL 2/PL d 安全函数 1e-5/h 的最大允许故障率的合理性。
对于 3D TOF,第 3 部分给出了全身检测所需的扩散系数,SRS/SRSS 性能等级 A 从 10% 到 90% 到 D 的 6%(对于 780nm 至 1100nm 范围内的激发频率)。
其他要求,例如公差区宽度为 5 西格玛,其中西格玛表示测量噪声,这些要求是所有 SRS/SRSS 性能等级的共同要求。
IEC 62998 也涵盖了传感器融合,传感器融合定义为“组合或关联有关显式或隐含知识框架中考虑的一个或多个实体的数据或信息的行为或过程,以提高检测、识别或表征该实体的能力(或提供新功能)。传感器中给出的一个例子是雷达和激光雷达传感器的组合。当使用传感器融合时,表5显示可以将SRRS性能等级提高一个级别。这个想法类似于IEC 61508-2:2010中的元素合成。
IEC 62998中提到的传感器包括超声波,无线局域网,无线个人局域网,雷达,被动红外,热成像相机,红外气体探测器以及通常的激光雷达,立体和3D TOF相机。
有趣的是,它包含有关儿童身高和其他方面的信息,暗示IEC 62998可用于非工业环境。
我仍然不完全理解IEC 62998的几个方面,为什么它需要提供置信度信息就是其中之一。这是否意味着IEC 61496系列不提供此类信息是错误的?这也意味着根据IEC 62998的传感器输出不仅仅是OSSD(只能发出信号打开或关闭的输出信号切换设备)。

图4 - 除了IEC 62998系列的要求之外,让我们看看IEC 62998不需要的内容。
IEC 62998-1 在开发 SIL 1 或 PL d 安全功能时,对 HFT=3 或 CAT 2 没有要求。这对于基于复杂电子设备的传感器非常有用,这些传感器具有高可靠性,并且可以在低诊断测试间隔下实现高诊断覆盖率。对于某些传感器类型,由于使用可靠性较低的机械组件或诊断覆盖率差,可能需要冗余,但对于其他技术,可以更高可靠性的电子组件,没有机械部件能够避免冗余将降低成本。
虽然IEC 62998是新的,但它的接受度正在增长。
新修订的(希望于 2023 年初发布)ISO 10218 机器人安全标准现在还包括对 IEC 62998 的引用。
即使您确实计划使用IEC 62998作为3D TOF的开发标准,您也不能完全忽略IEC 61496,因为如果开发一些诸如3D TOF相机之类的标准,例如,使用黑色,白色和反射板测试对象的测试要求,则该标准的型式测试要求仍然很好。即使IEC 62998中没有提到,也很难证明不实施这些要求是合理的。
审核编辑:郭婷
上一篇:xMR传感器和功能安全




 关注微信
关注微信