时间:2026-01-20 17:37
人气:
作者:admin
本项目为RT-Thread嵌入式大赛获奖作品,基于RT-Thread和兆易创新GD32F527I-EVAL的健康监测站。
目录
项目概述
系统硬件框架结构
基础驱动程序实现
整体驱动实现
工程效果
演示视频及代码
演示视频链接:https://www.bilibili.com/video/BV1WgUoBXE2n/?pop_share=1&vd_source=e1bd226340c8b87027d5dcfc6b0c3344
1 项目概述
1.1 项目背景
血氧、心率监测是人们最常关心的,特别是一些特殊的群体比如老人,患有心血管系统、呼吸系统疾病的人。能方便及时的监测到心率与血氧。本项目主要利用了开发板的大内存、大屏幕,移植LVGL,能够让老年人也看得清楚。
1.2 系统功能介绍
基于GD32F527I-EVAL开发板实现如下功能:
使用管方的RTTherad库,管理整个系统资源。
移植LCD驱动,给LVGL提供显示基础
移植触摸驱动,给LVGL提供用户输入基础
移植USART5,实现与传感器的交互接口。
移植LVGL,设计GUI界面
实现传感器驱动,实现血氧、心率的监测。
1.3 系统使用的技术要点
整个系统由国产开源操作系统RT-Thead实现驱动的模块化设计,以及系统调度。
硬件:GD32F527I-EVAL
开发板语言:C、GuiGuider
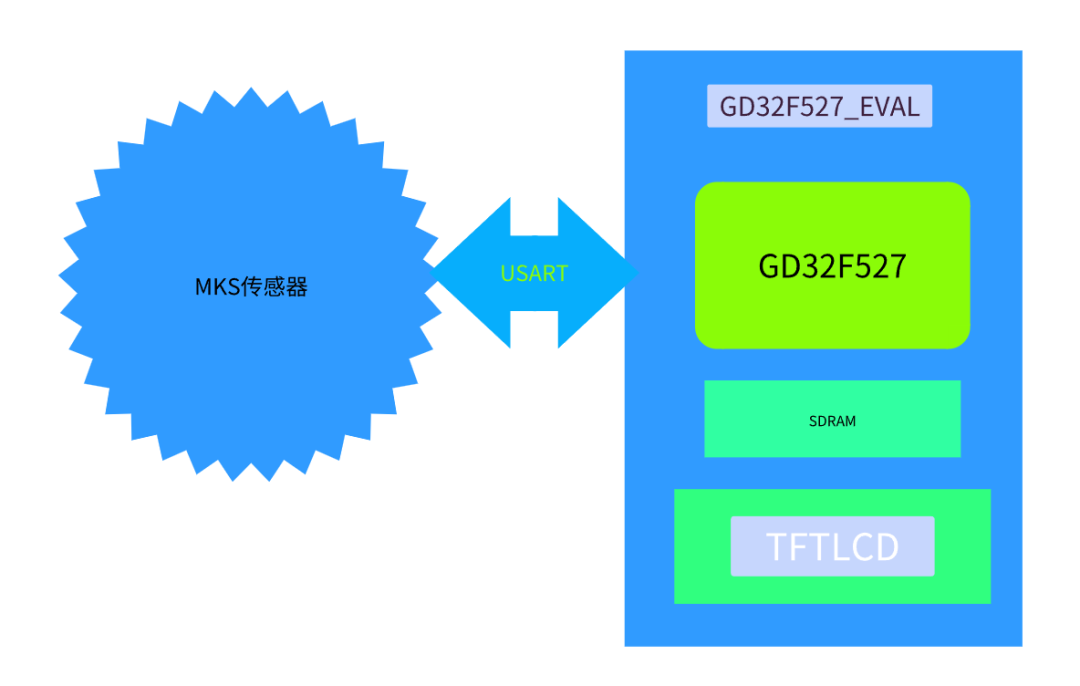
2 系统硬件框架结构
2.1 TFT—LCD接口
开发板板载了LCD屏,其原理图如下:

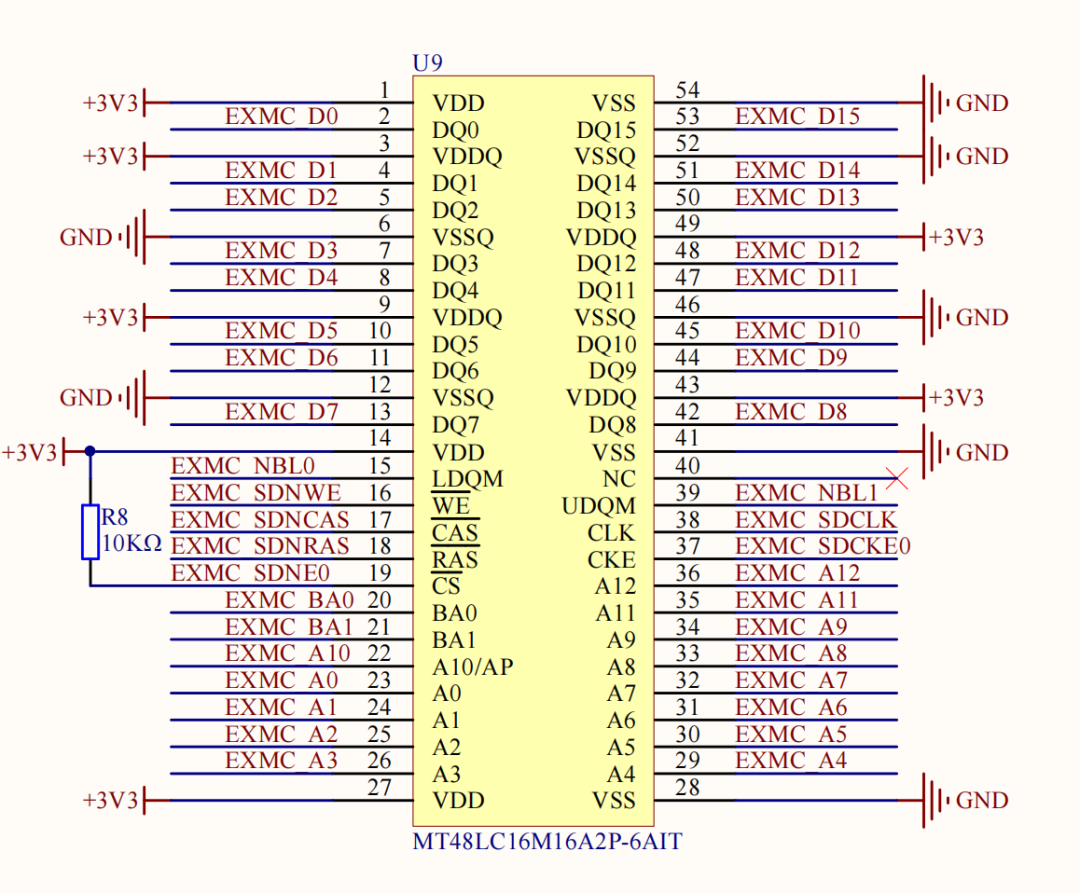
2.2 SDRAM接口
由于开发板上外扩了RAM,给LVGL驱动提供了大内存空间,原理图如下:
2.3 USART5接口
由于开发板的外设非常多,找到摄像头接口的PC6、PC7作为USART5的接口:
3 基础驱动程序实现
3.1 基础工程
3.1.1 下载RT-Thread源码
https://gitee.com/rtthread/rt-thread
下载源码到本地。
3.1.2 同步并打包
下载好源码后,进入rt-thread/tree/master/bsp/gd32/arm/gd32527I-eval目录下面执行pkgs —upgrade-force同步
然后进行pkgs —update
执行scons —target=mdk5
然后进行scons —dist打包单独的工程。
复制打包好的工程到单独的目录下。
现在单独的工程就创建好了。
3.2 移植LVGL
创建好工程后,首先就需要生成用户交互界面。我在论坛有单独的作品:
https://club.rt-thread.org/ask/article/a2dba0eaa063757a.html
3.3 移植触摸驱动
LVGL需要驱动触摸屏,我也有单独的作品:
https://club.rt-thread.org/ask/article/104ea5e6b33e788e.html
3.4 移植mks传感器串口接口
详见单独作品:
https://club.rt-thread.org/ask/article/1074357ba9757cdb.html
4 整体驱动实现
通过上的基工程的实现,接下来就是整合驱动,实整个工程。
4.1 界面设计
4.1.1 GuiGuide设计
我使用开源的GuiGuider设了用户交互界面:
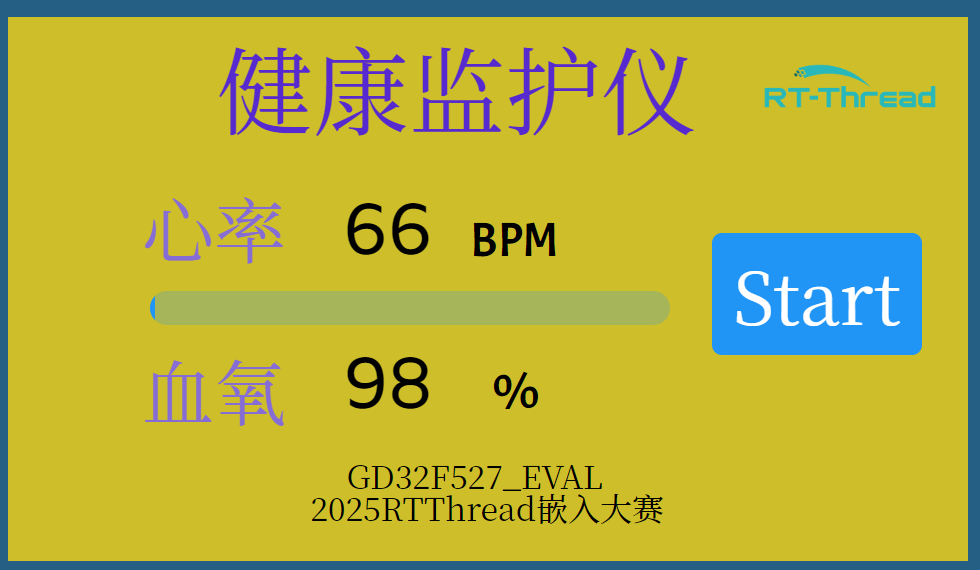
控件1:btn_start,实现开始、停止测量的复用功能
控件2:label_heart 用于显示测量到的心率值
控件3:label_spo2 用于显示测量到的心率值
控件4:bar 用于显示测量的进度条
其余控件为固定标签。
4.1.2 事件添加
为btn_start 添加clicked事件
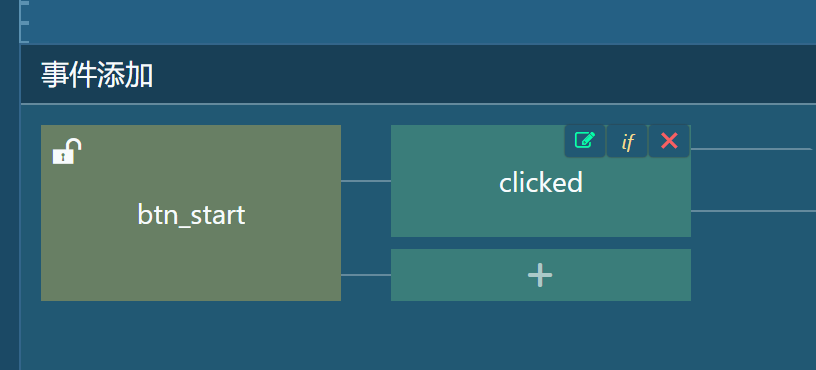
最后生成C语言的工程。
4.2 LVGL工程移植
4.2.1 复制guiguider工程
在生成工程的目录中,我复制generated文件夹到基础工程下的LVGL目录下面,替换掉原来的generated文件夹。
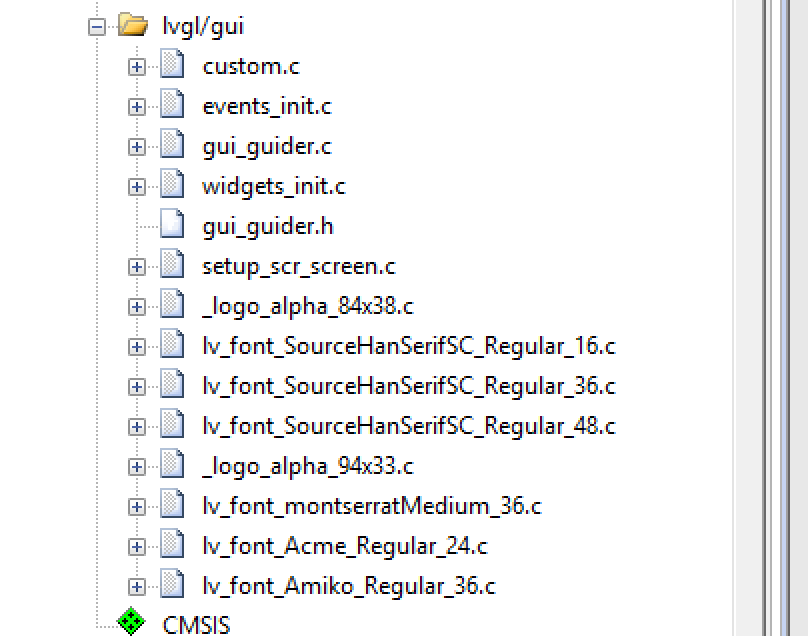
4.2.2 添加文件到工程
在mdk中,将generated下面的所有.c/h添加到mdk工程中:
4.2.3 添加bnt事件代码
根据传感器的手册,我们开始测量时,是向串口发送数据0x8A,停止是向串口发送0x88。
添加按键的的驱动代码如下:
externlv_ui guider_ui;externintmks_cmd(intargc,char*argv[]);// 全局/静态变量:控制进度条和定时器(确保回调中可访问)staticlv_timer_t*progress_timer =NULL; // 进度条定时器staticint current_progress =0; // 当前进度值(0-100)// 进度条定时器回调函数(每隔 200ms 触发一次)staticvoidprogress_timer_cb(lv_timer_t*timer){ current_progress++; // 每次进度 +1%(200ms × 100 = 20 秒) // 更新进度条值(关闭动画,避免和定时器冲突) lv_bar_set_value(guider_ui.screen_bar, current_progress, LV_ANIM_OFF); // 进度达到 100%,停止定时器并重置状态 if(current_progress >=100) { lv_timer_del(progress_timer); // 删除定时器(释放资源) progress_timer =NULL; // 重置定时器指针 current_progress =0; // 重置进度值 char*argv[] = {"mks_cmd","stop",NULL}; intargc =2; mks_cmd(argc, argv); // 可选:进度完成后,自动将按钮切回「开始」 lv_label_set_text(guider_ui.screen_btn_start_label,"Start"); lv_bar_set_value(guider_ui.screen_bar,0, LV_ANIM_OFF); }}staticvoidscreen_btn_start_event_handler(lv_event_t*e){ lv_event_code_tcode =lv_event_get_code(e); switch(code) { caseLV_EVENT_CLICKED: { constchar *btn_text =lv_label_get_text(guider_ui.screen_btn_start_label);; if(btn_text !=NULL&&strcmp(btn_text,"Start") ==0) { rt_kprintf("start test\n"); // 停止已存在的定时器(避免重复启动,防止进度加速) if(progress_timer !=NULL) { lv_timer_del(progress_timer); progress_timer =NULL; } // 初始化进度状态 current_progress =0; lv_bar_set_range(guider_ui.screen_bar,0,100); // 设置进度条范围:0-100(百分比) lv_bar_set_value(guider_ui.screen_bar,0, LV_ANIM_OFF); // 进度条归零 // 创建并启动定时器:周期 200ms,触发回调函数 progress_timer =lv_timer_create(progress_timer_cb,200,NULL); lv_timer_resume(progress_timer); // 启动定时器(LVGL 定时器默认创建后启动,保险起见手动调用) // 构造参数并调用 char*argv[] = {"mks_cmd","start",NULL}; intargc =2; mks_cmd(argc, argv); lv_label_set_text(guider_ui.screen_btn_start_label,"Stop"); } elseif(btn_text !=NULL&&strcmp(btn_text,"Stop") ==0) { // 停止并删除定时器 if(progress_timer !=NULL) { lv_timer_del(progress_timer); progress_timer =NULL; } // 进度条归零,状态重置 current_progress =0; lv_bar_set_value(guider_ui.screen_bar,0, LV_ANIM_OFF); char*argv[] = {"mks_cmd","stop",NULL}; intargc =2; mks_cmd(argc, argv); lv_label_set_text(guider_ui.screen_btn_start_label,"Start"); lv_obj_center(guider_ui.screen_btn_start_label); } break; } default: break; }}
4.2.4 添加初始化gui代码
在main.c中添加用于lvgl 心跳包的任务,与初始化lvgl的代码:
#defineLED1_PIN GET_PIN(E, 3)#defineLVGL_TASK_PERIOD 10 // ms#defineLVGL_TICK_PERIOD 5 // mslv_ui guider_ui;staticrt_thread_tlvgl_task_thread = RT_NULL;staticrt_thread_tlvgl_tick_thread = RT_NULL;staticvoidlvgl_tick_thread_entry(void*parameter){ while(1) { lv_tick_inc(5); rt_thread_delay(5); }}staticvoidlvgl_task_thread_entry(void*parameter){ lv_init(); lcd_init(); lv_port_disp_init(); lv_port_indev_init(); setup_ui(&guider_ui); setup_ui(&guider_ui); events_init(&guider_ui); while(1) { lv_task_handler(); rt_thread_delay(10); }}intmain(void){ /* set LED1 pin mode to output */ rt_pin_mode(LED1_PIN, PIN_MODE_OUTPUT); exmc_synchronous_dynamic_ram_init(EXMC_SDRAM_DEVICE0); //在这里启用两个任务 lvgl_task_thread =rt_thread_create("lvgl_task", lvgl_task_thread_entry, RT_NULL,4096,25,10); if(lvgl_task_thread != RT_NULL) rt_thread_startup(lvgl_task_thread); lvgl_tick_thread =rt_thread_create("lvgl_tick", lvgl_tick_thread_entry, RT_NULL,512,25,10); if(lvgl_tick_thread != RT_NULL) rt_thread_startup(lvgl_tick_thread); while(1) { rt_thread_mdelay(1000);// 主线程可以做其他事情 } returnRT_EOK;}
将程序下载到开发板后,按下按键,能在USART5上面看到的0x8A、0x88输出,说明程序运转正常。
4.3 mks传感器驱动
4.3.1 mks传感器通信协议:

根据通信协议进行串口的代码实现。
4.3.2 mks串口添加:
在menuconfig中,打开usart5,保存工程并重新生成工程。
4.3.3 mks串口驱动实现
在驱动中,按照rtthead srial的标准驱动。
由于mkd传感器的波特率为38400,因此需要在初始化后,重新配置serial的驱动结构体,并进行配置。
定义他为uart5 实现中断接收功能,详见驱动代码如下:
接收传感器并实现解码,并实时将接收到的数据通过LVGL显示到界面中。
#include"app.h"#include"string.h"#include#include#include#include"lvgl.h"#include"gui_guider.h"#defineMAX_BUFFSIZE 128#defineRECEIVE_LENGTH 88#definePACKET_HEADER 0xFF#defineSAMPLE_UART_NAME "uart5"/* 用于接收消息的信号量 */staticstructrt_semaphorerx_sem;staticrt_device_tserial;// --- 全局变量定义 ---int8_tmks_waveform_data[MKS_WAVEFORM_SAMPLES];uint8_tmks_heart_rate =0;uint8_tmks_spo2 =0;volatileuint8_tmks_new_data_flag =0; // Use volatile as it might be checked in timer/ISR context later// --- 内部接收缓冲区 ---staticuint8_tmks_rx_buffer[MKS_PACKET_SIZE];staticuint8_tmks_bytes_received =0;// lvglexternlv_ui guider_ui;staticchar buf[4];/* 接收数据回调函数 */staticrt_err_tuart_input(rt_device_tdev,rt_size_tsize){ /* 串口接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */ rt_sem_release(&rx_sem); returnRT_EOK;}/*** 串口接受线程* @param parameter*/staticvoidserial_thread_entry(void*parameter){ charch; mks_bytes_received =0; // Reset buffer state mks_new_data_flag =0; // 初始无新数据 // 初始化数据为0 memset(mks_rx_buffer,0, RECEIVE_LENGTH); mks_heart_rate =0; mks_spo2 =0; while(1) { /* 从串口读取一个字节的数据,没有读取到则等待接收信号量 */ while(rt_device_read(serial,-1, &ch,1) !=1) { /* 阻塞等待接收信号量,等到信号量后再次读取数据 */ rt_sem_take(&rx_sem, RT_WAITING_FOREVER); } if(ch == PACKET_HEADER) { mks_bytes_received =1; mks_new_data_flag =0; mks_rx_buffer[0] = (uint8_t)ch; } else { if(mks_bytes_received>0) { //mks_bytes_received++; mks_rx_buffer[mks_bytes_received++] = (uint8_t)ch; if(mks_bytes_received >= RECEIVE_LENGTH) { mks_new_data_flag =1; mks_bytes_received =0; sprintf(buf, "%d", mks_rx_buffer[65]); lv_label_set_text(guider_ui.screen_label_heart, buf);//更新到LVGL sprintf(buf, "%d", mks_rx_buffer[66]); lv_label_set_text(guider_ui.screen_label_spo2, buf);//更新到LVGL memset(mks_rx_buffer,0, RECEIVE_LENGTH); mks_new_data_flag =0; } } } }}staticintuart_sample(intargc,char*argv[]){ rt_err_tret = RT_EOK; struct serial_configurecfg; // 配置结构体 charuart_name[RT_NAME_MAX]; charstr[] ="hello RT-Thread!\r\n"; if(argc ==2) { rt_strncpy(uart_name, argv[1], RT_NAME_MAX); } else { rt_strncpy(uart_name, SAMPLE_UART_NAME, RT_NAME_MAX); } /* 查找系统中的串口设备 */ serial =rt_device_find(uart_name); if(!serial) { rt_kprintf("find %s failed!\n", uart_name); returnRT_ERROR; } cfg.baud_rate = BAUD_RATE_38400; // 目标波特率(可改为 38400、19200 等) cfg.data_bits = DATA_BITS_8; // 8 数据位 cfg.stop_bits = STOP_BITS_1; // 1 停止位 cfg.parity = PARITY_NONE; // 无校验 cfg.bit_order = BIT_ORDER_LSB; // 低位优先(默认) cfg.invert = NRZ_NORMAL; cfg.bufsz = RT_SERIAL_RB_BUFSZ; cfg.flowcontrol = RT_SERIAL_FLOWCONTROL_NONE; cfg.reserved =0; rt_device_control(serial, RT_DEVICE_CTRL_CONFIG, &cfg); /* 初始化信号量 */ rt_sem_init(&rx_sem,"rx_sem",0, RT_IPC_FLAG_FIFO); /* 以中断接收及轮询发送模式打开串口设备 */ rt_device_open(serial, RT_DEVICE_FLAG_INT_RX); /* 设置接收回调函数 */ rt_device_set_rx_indicate(serial, uart_input); /* 发送字符串 */ rt_device_write(serial,0, str, (sizeof(str) -1)); /* 创建 serial 线程 */ rt_thread_tthread =rt_thread_create("serial", serial_thread_entry, RT_NULL,1024,25,10); /* 创建成功则启动线程 */ if(thread != RT_NULL) { rt_thread_startup(thread); } else { ret = RT_ERROR; } returnret;}intmks_cmd(intargc,char*argv[]){ rt_err_tret = RT_EOK; uint8_tsend_data =0; // 要发送的字节数据 // 第一步:检查串口设备是否已初始化(首次使用时查找并打开) if(serial == RT_NULL) { // 查找串口设备 serial =rt_device_find(SAMPLE_UART_NAME); if(serial == RT_NULL) { rt_kprintf("错误:未找到串口设备 %s!\n", SAMPLE_UART_NAME); returnRT_ERROR; } // 打开串口(RT_DEVICE_OFLAG_RDWR:读写模式) if(rt_device_open(serial, RT_DEVICE_OFLAG_RDWR) != RT_EOK) { rt_kprintf("错误:打开串口设备 %s 失败!\n", SAMPLE_UART_NAME); serial = RT_NULL; // 打开失败,重置句柄 returnRT_ERROR; } } // 第二步:解析命令参数 if(argc ==2) // 仅支持 "mks start" 或 "mks stop"(2个参数) { // 比较第二个参数(argv[1]) if(strcmp(argv[1],"start") ==0) { send_data =0x8A; // start 对应发送 0x8A rt_kprintf("执行 mks start,发送数据:0x%02X\n", send_data); } elseif(strcmp(argv[1],"stop") ==0) { send_data =0x88; // stop 对应发送 0x88 rt_kprintf("执行 mks stop,发送数据:0x%02X\n", send_data); } else { // 无效参数:提示正确用法 rt_kprintf("错误:无效命令参数!\n"); rt_kprintf("正确用法:\n"); rt_kprintf(" mks start - 发送 0x8A\n"); rt_kprintf(" mks stop - 发送 0x88\n"); return-RT_EINVAL; } // 第三步:通过串口发送数据(发送1个字节) ret =rt_device_write(serial,0, &send_data,1); if(ret !=1) // rt_device_write 返回实际发送的字节数,成功应为 1 { rt_kprintf("错误:串口发送失败!返回值:%d\n", ret); return-RT_ERROR; } } else { // 参数个数错误:提示正确用法 rt_kprintf("错误:命令格式错误!\n"); rt_kprintf("正确用法:\n"); rt_kprintf(" mks start - 发送 0x8A\n"); rt_kprintf(" mks stop - 发送 0x88\n"); return-RT_EINVAL; } returnret;}// 3. 导出命令到 FinSH 终端(支持在终端直接输入 mks 命令)MSH_CMD_EXPORT(mks_cmd, mks command: mks start/stop);/* 导出到 msh 命令列表中 */MSH_CMD_EXPORT(uart_sample, uart device sample);
接收传感器并实现解码,并实时将接收到的数据通过LVGL显示到界面中。
5 工程效果

6 演示视频及代码
演示视频链接:https://www.bilibili.com/video/BV1WgUoBXE2n/?pop_share=1&vd_source=e1bd226340c8b87027d5dcfc6b0c3344
源代码:https://club.rt-thread.org/file_download/a6fe3781d8bcf12d






 关注微信
关注微信