时间:2010-07-15 17:15
人气:
作者:admin
本设计的整体结构如图1所示。
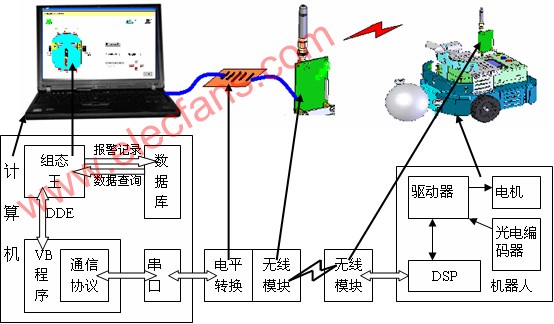
 图2 监视控制界面
(2)其次完成组态王数据库的访问。本设计采用Access数据库,建立“my.mdb”数据库,并在计算机上配置好数据源。该数据库存放的是火情报警的历史记录。此系统在数据库上有以下功能:①系统启动时,可自行建立表格。②实时记录报警。在报警出现时使用组态王提供的函数,将数据写入所连接的数据库中指定的表格。③按照选择日期条件显示符合日期的历史报警数据。为了方便使用,系统中使用组态王提供的KVDBGrid控件,设置好该控件的属性,就可以实时显示所连接的数据库的数据情况。查询所使用的控件是组态王提供的日期控件。在进行历史数据查询时,可以根据所选择的日期条件显示出对应的历史数据。
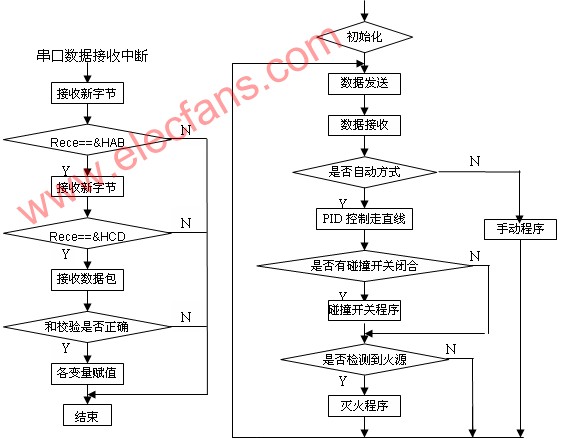
2.1无线串口通信的实现
图2 监视控制界面
(2)其次完成组态王数据库的访问。本设计采用Access数据库,建立“my.mdb”数据库,并在计算机上配置好数据源。该数据库存放的是火情报警的历史记录。此系统在数据库上有以下功能:①系统启动时,可自行建立表格。②实时记录报警。在报警出现时使用组态王提供的函数,将数据写入所连接的数据库中指定的表格。③按照选择日期条件显示符合日期的历史报警数据。为了方便使用,系统中使用组态王提供的KVDBGrid控件,设置好该控件的属性,就可以实时显示所连接的数据库的数据情况。查询所使用的控件是组态王提供的日期控件。在进行历史数据查询时,可以根据所选择的日期条件显示出对应的历史数据。
2.1无线串口通信的实现
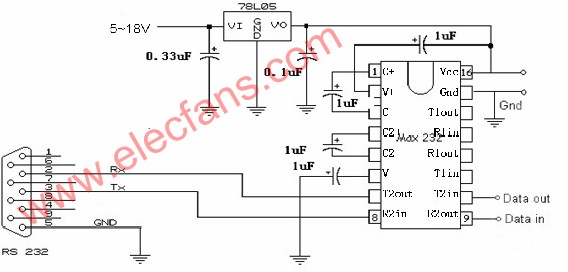
(1) 首先制作RS-232电平和TTL电平的双向转换电路。由于PC机使用
| bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 | ||
| 0XAB | |||||||||
| 0XCD | |||||||||
| 手动或自动 | 车是否向前 | 车是否后退 | 车是否向左转 | 车是否向右转 | |||||
| PID参数(K) | |||||||||
| PID参数(Ti) | |||||||||
| PID参数(Td) | |||||||||
| SUM CHECK(低字节在先) | |||||||||
| out_Send[7] | |||||||||
| bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 | |||
| 0XAB | ||||||||||
| 0XCD | ||||||||||
| 左轮脉冲计数(低字节) | ||||||||||
| 左轮脉冲计数(高字节) | ||||||||||
| 右轮脉冲计数(低字节) | ||||||||||
| 右轮脉冲计数(高字节) | ||||||||||
| 指南针与车所成角度 | ||||||||||
| SUM CHECK(低字节在先) | ||||||||||
上一篇:连续相位QAM调制原理
下一篇:以太网设计的远程液位监控系统


 关注微信
关注微信