时间:2022-08-24 10:53
人气:
作者:admin
Autosar网络管理中,如果节点是网关节点,对开发和测试来说都是不小的挑战,如果对需求解读不到位,开发架构设计错误,后期的测试也就bug bug bug...
本文针对网关节点(包含PNC功能)解读路由需求以及开发注意事项。本文讨论的内容涉及PN(Partial Network)功能,本文源于工程实际,还是能给大家点启发的。
提示:基于can总线讨论
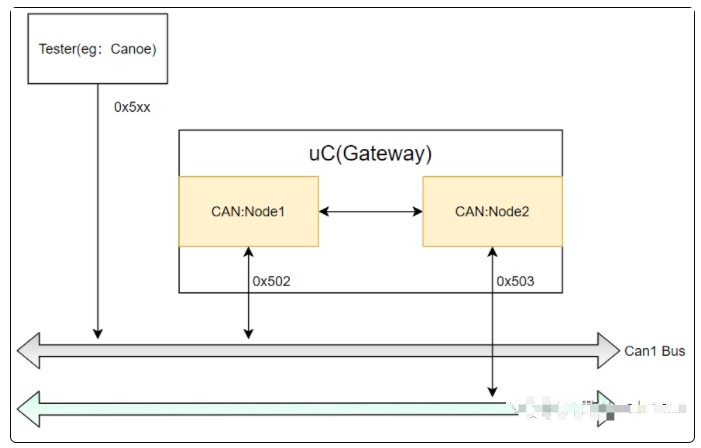
1 需求明确 需求:某个ECU包含两个节点:Node1和Node2,两者为网关节点,均包含PNC功能。要求网络管理报文的路由时间<15ms。
提示:
Node1和Node2是主动激活节点,即两个Node均具有快发模式;
PNC1和PNC2均关联Can1和Can2。
2 需求说明
这里我们从测试角度分析需求应该如何测试。
举例分析:上位机(Tester)模拟发送一帧网络管理报文0x5xx(网络管理报文有效范围:0x500~0x53F)到Can1 Bus,Can1 Node收到这帧网络管理报文以后,内部转发给Can2 Node(实际由ComM判断PNC,进而决定哪些Node网络状态切换)。在Normal Mode模式下,Node1会发送网络管理报文0x502到Can1 Bus,Node2会发送网络管理报文0x503到Can2 Bus。
测试关键步骤:
Tester发送仅包含PNC1的网络管理报文0x5xx;
5s后,Node1和Node2进入NOS(Normal Operation State)状态,且两者均以1s周期外发各自的网络管理报文;
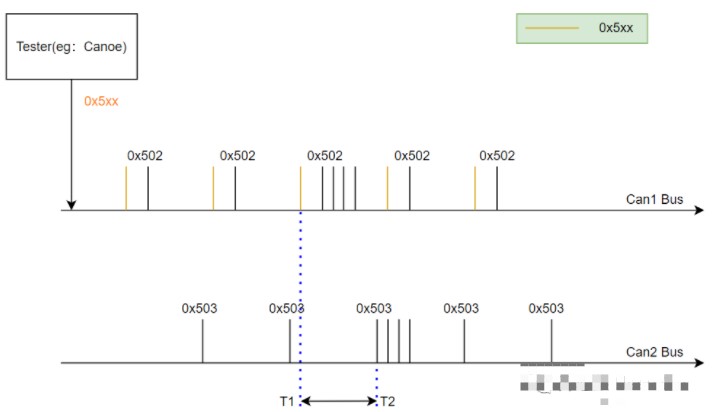
此时上位机模拟发送一帧网络管理报文(包含PNC1、PNC2)给Node1,Node1、Node2均进入快发模式,Can1 bus总线上第一次出现PNC2置位的模拟网络管理报文时间记为T1;
Node2也进入快发模式,当Node2发送出第一帧包含PNC2的网络管理报文0x503的时间记为T2(Node2此时处于快发模式),如果T2-T1 < 15ms+(15*0.01)ms = 16.5ms,则测试通过。
测试分析图如下所示:
3 开发注意
当理解了需求以后,开发者实现过程中有几点需要注意:
Node1接收的网络管理报文是一个范围,而非某帧网络管理报文,比如:本例网络管理报文的范围是0x500~0x53F,该范围内的任一帧网络管理报文,如果PNC关联Node2,均应使得Node2进入快发模式,反之亦然;
Node1和Node2的唤醒与PNC相关,与应用报文的路由不要混为一谈。PNC关联哪些Node,ComM会请求哪些Node的网络状态切换,而应用报文的路由可以通过PDUR进行PDR级别路由或者Com层的信号(Signal)路由;
配置参数CanNmPnHandleMulti勾选;
网络管理有PN功能时,ComM负责调用CanNm_NetworkRequest()接口。
坑点: Node1和Node2均有Pn功能,配置参数CanNmPnHandleMultipleNetworkRequests需要勾选,当状态由NOS->RMS(Repeat Message State)切换的时候,Node进入快发模式。
审核编辑:刘清




 关注微信
关注微信