时间:2022-11-30 10:54
人气:
作者:admin
焊接控制气抱硬件错误 故障代码: 88-4
可能原因 :
- 启动时模块有缺陷,模块与固件代码不匹配
- 硬件系统与新导入的固件代码不匹配
0x0001 1 Flash缺陷 defective flash
0x0002 2 RAM存储缺陷 defective RAM memory
0x0004 4 模拟模块 analog module
0x0008 8 其他模拟模块 analog additional module
0x0010 16 电源模块 power unit module
0x0020 32 I/O 模块 I/O module
0x0040 64 其他I/O 模块 I/O additional module
0x0080 128 现场总线模块缺失(模块缺失不属于故障范畴)field bus module missing (missing module is not a fault!)
0x0100 256 其它模块1 additional_module_I
0x0200 512 其它模块2 additional_module_II
如果有数个故障报出,系统信息显示时将把它们的故障编号相加。如下例,错误信息132意味着: 128+4=132
128 Field bus module
4 Analog module
= 132
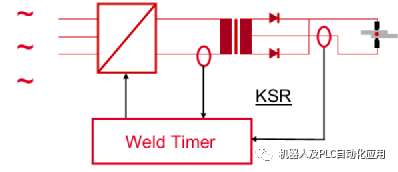
注: 对于硬件故障,控制器不能通过复位恢复到就绪状态。若X3(KSR传感器)有外部电压,错误信息4( 模拟模块)也可被激发。

工业标准是150mV / kA. 这是在标定过程中自动调整以适用个体使用.
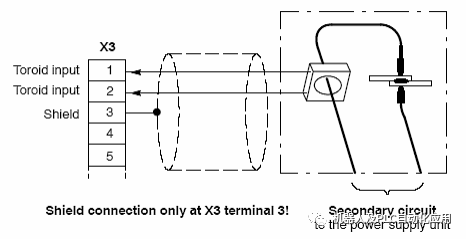
| 如何检查恒流传感器 | |
| 测量欧姆电阻 | 结果 |
| 小于7欧姆 | 测量回路短路了 |
| 12到950欧姆 | 测量回路OK |
| 大于1100欧姆 | 测量回路开路了 |
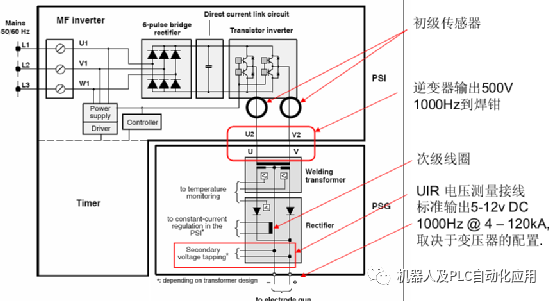
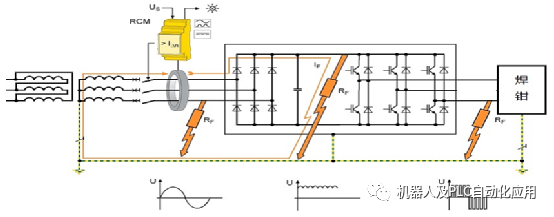
Bender的漏电监视仪由一个控制器和一个电流互感器组成,能连续不断的测量和显示某个电气设备的漏电值。当漏电值超过设定值时,会给出一个继电器触点报警信号。
焊接终止/无电流
焊接开始后40ms内无电流(任务被取消)
- 初级电流测量回路二极管有缺陷
处理
检查闭合机制(机器人)- 检查电极位置和压力
检查电缆管束
清理板材
检查传导性
检查电流传感器分布
更换传感器
更换焊接变压器
焊接1到3无电流
- 电极未闭合
- 焊点处无电气接触
- 板材污染
措施
- 检查闭合机制( 机器人)
- 检查电极位置和压力
- 清洗板材
- 检查传导性
编辑:黄飞
上一篇:电机如何进行准备选型?
下一篇:变频器在天然气空压机的应用




 关注微信
关注微信