时间:2016-04-11 16:13
人气:
作者:admin
现代汽车工业的迅速发展带来汽车型号的迅速变化和车体设计的不断调整,只有采用机器人才能适应这种频繁变化的生产要求。采用机器人来代替喷涂机械,进行工件表面的自动喷涂,由机器人控制喷枪,使之在喷涂过程中与喷涂表面保持正确的角度和恒定的距离,通过专门的软件对喷涂对象的三维模型进行处理,确定喷枪的移动路径和相应的喷涂参数。机器人全自动喷涂生产线实现了精确喷涂和环保涂装。海马郑州第二工厂涂装车间安装使用的是先进的YASKAWA生产的EPX-2900型防爆喷涂机器人。机器人肘部配备法国SAMES公司高转速杯式静电自动喷涂系统。油漆供给及换色系统由气动控制柜,换色阀,齿轮泵电机及齿轮泵,静电喷杯(喷枪),油漆、溶剂及空气供给管路,流量、雾化压力,成形空气压力,高电压调节系统组成。每套机器人投入百万余元,在实际生产中出现多次机器人碰撞事件,造成了较为严重的经济损失。
1、机器人碰撞的分类
综合目前现场遇到的机器人碰撞事件主要分为以下几种类型:
1.1机器人本体之间的相互碰撞
1.2机器人与喷漆室室体之间的碰撞
1.3机器人与待喷涂物之间的碰撞
2、碰撞原因分析
2.1机器人本体之间的碰撞。
此种碰撞一般较为少见。在喷涂机器人进行新车型导入的时候会伴有此种情况的发生。发生碰撞的原因也比较简单。即在进行新的车型仿型示教时,喷涂动作路径的不合理设置。
2.2机器人与喷漆室室体之间的碰撞。
此种碰撞与前一种碰撞类似,发生原因基本一致。
2.3机器人与待喷涂物之间的碰撞。
此种碰撞是机器人静电喷涂系统之中最为常见的一种。导致此类碰撞发生的原因主要是以下几点:
2.2.1仿型示教的动作路径设置偏差。
机器人在新车型导入时一般是现在仿型示教软件上按照现场实际机器人的位置进行建模并将新车型的数模导入到工程文件里面进行离线模拟。之后,将仿型示教程序导入至现场的各个机器人控制柜中。手动运行动作,按照实际车身的位置进行微调。如果微调量较大并且未能进行有效验证。那么就会产生机器人自动动作时碰撞。
2.2.2待喷涂物形状发生较大形变。
机器人在现场自动喷涂的过程中按照仿型示教的动作路径进行自动执行。而当待喷涂物发生较为严重的形变时,机器人无法自动识别待喷涂物的实际状态,依然按照原来的动作路径运行。碰撞因此产生。
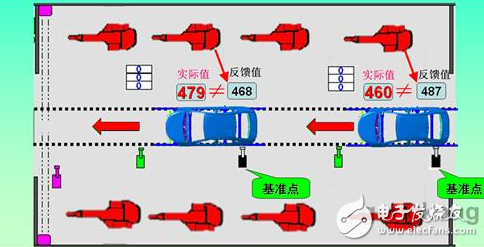
2.2.3待喷涂物位置产生较为严重的偏差。




 关注微信
关注微信