时间:2014-03-27 11:31
人气:
作者:admin
引言
目前,便携式移动机器人全自主控制方式尚不成熟,其监控系统普遍采用人在环半自主控制方式设计。为满足携带、系统小型化、嵌进式的结构特点,故设计便携式移动机器人手持监控系统,并将其用于履带结构便携式移动机器人实验平台。
功能设计
手持监控系统对便携式移动机器人起到监视与控制的全局性作用。手持监控系统可划分为视频图像监视模块、状态信息监测模块、远控指令模块、无线通讯模块、数字与图交互模块、全局路径规划模块六大功能模块(见图1)。
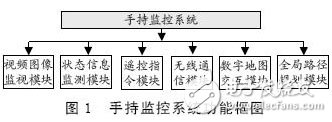
视频图像监视模块对便携式移动机器人所处环境进行视频监视;状态信息监测模块对机器人自身状态信息的监测;远控指令模块实现基本的运动指令编码以及发送;无线通讯模块实现运动指令、状态信息、视频信号等数据的无线传输;数字舆图交互模块实现环境地理信息的数字化显示及人机交互功能;全局路径规划模块实现点到点的最优路径搜索功能。
硬件系统
手持监控系统的硬件系统可划分为若干模块,各个模块实现自身相对独立的功能。
硬件结构与接口
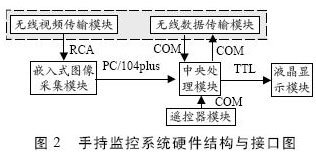
手持监控系统硬件系统采用基于嵌进式系统的PCI 总线的PC/104plus 总线结构,分为无线通讯、嵌进式图像采集、中心处理、远控器、液晶显示等五大模块。无线通讯模块又划分为无线数据传输和无线视频传输模块。无线数据传输模块实现运动指令、状态信息等窄带数据无线传输;无线视频传输模块实现视频图像信号等宽带数据无线传输。
硬件系统各模块通过接口实现信息交换与数据共享。中心处理模块通过PC/104plus 总线与嵌进式图像采集模块接口,实现模块之间视频图像数据的传输。中心处理模块与无线数据传输模块及远控器模块通过串口连接。中心处理模块通过TTL接口与液晶显示模块连接。嵌进式图像采集模块与无线视频传输模块通过RCA 接口实现复合视频信号的传输(见图2)。
硬件模块实现
无线数据传输模块采用微功率无线数据传送单元实现。嵌进式图像采集模块采用PC/104plus总线结构的嵌进式图像采集卡实现。中心处理模块采用PC/104plus总线结构的单板机实现。远控器模块通过自行设计电路板实现按键扫描、指令编码以及串口发送等功能。液晶显示模块采用小型彩色液晶屏实现。以上各硬件模块实现符合手持设备小型化、便携式的硬件要求。
软件系统
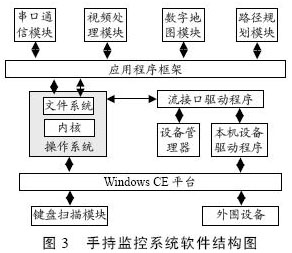
手持监控系统的软件系统选用Windows CE(WinCE)作为嵌进式操纵系统平台,监控系统软件包括:操纵系统定制、设备驱动程序开发、应用程序。应用程序又分为:键盘扫描模块、串口通讯模块、视频处理模块、数字舆图模块、路径规划模块五大模块(见图3)。
上一篇:PLC梯形图编程八个必须步骤




 关注微信
关注微信