时间:2021-01-28 10:01
人气:
作者:admin
本原创教程由芯驿电子科技(上海)有限公司(ALINX)创作,版权归本公司所有,如需转载,需授权并注明出处。
AXU2CGA/AXU2CGB/AXU3EG/AXU4EV-E/AXU4EV-P/AXU5EV-E/AXU5EV-P /AXU9EG/AXU15EG
vivado工程目录为“ps_hello/vivado”
vitis工程目录为“ps_net/vitis”
软件工程师工作内容
以下为软件工程师负责内容。
开发板有两路千兆以太网,通过RGMII接口连接,本实验演示如何使用Vitis自带的LWIP模板进行PS端千兆以太网TCP通信。
LWIP虽然是轻量级协议栈,但如果从来没有使用过,使用起来会有一定的困难,建议先熟悉LWIP的相关知识。
1.1 LWIP库修改
由于自带的LWIP库只能识别部分phy芯片,如果开发板所用的phy芯片不在默认支持范围内,要修改库文件。也可以直接使用修改过的库替换原有的库。
1) 找到库文件目录“X:\xxx\Vitis\2020.1\data\embeddedsw\ThirdParty\sw_services”
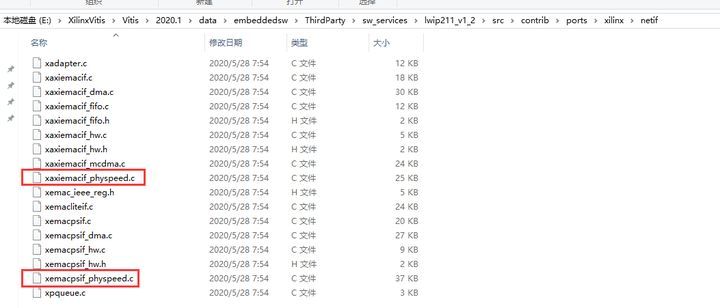
2)找到要修改的文件目录“lwip211_v1_2\src\contrib\ports\xilinx\netif”中文件“xaxiemacif_physpeed.c”和“xemacpsif_physpeed.c”要修改。
3)修改PL端的“xaxiemacif_physpeed.c”文件,添加相关宏定义
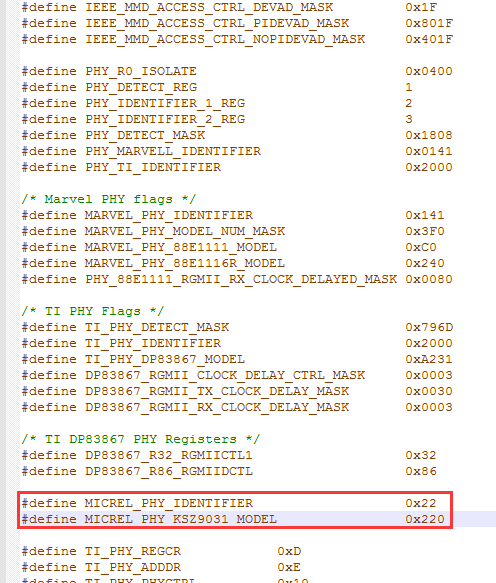
4)添加phy速度获取函数
unsignedintget_phy_speed_ksz9031(XAxiEthernet*xaxiemacp,u32phy_addr){
u16control;
u16status;
u16partner_capabilities;
xil_printf("StartPHYautonegotiation\r\n");
XAxiEthernet_PhyWrite(xaxiemacp,phy_addr,IEEE_PAGE_ADDRESS_REGISTER,2);
XAxiEthernet_PhyRead(xaxiemacp,phy_addr,IEEE_CONTROL_REG_MAC,&control);
//control|=IEEE_RGMII_TXRX_CLOCK_DELAYED_MASK; control&=~(0x10);
XAxiEthernet_PhyWrite(xaxiemacp,phy_addr,IEEE_CONTROL_REG_MAC,control);
XAxiEthernet_PhyWrite(xaxiemacp,phy_addr,IEEE_PAGE_ADDRESS_REGISTER,0);
XAxiEthernet_PhyRead(xaxiemacp,phy_addr,IEEE_AUTONEGO_ADVERTISE_REG,&control);
control|=IEEE_ASYMMETRIC_PAUSE_MASK;
control|=IEEE_PAUSE_MASK;
control|=ADVERTISE_100;
control|=ADVERTISE_10;
XAxiEthernet_PhyWrite(xaxiemacp,phy_addr,IEEE_AUTONEGO_ADVERTISE_REG,control);
XAxiEthernet_PhyRead(xaxiemacp,phy_addr,IEEE_1000_ADVERTISE_REG_OFFSET,
&control);
control|=ADVERTISE_1000;
XAxiEthernet_PhyWrite(xaxiemacp,phy_addr,IEEE_1000_ADVERTISE_REG_OFFSET,
control);
XAxiEthernet_PhyWrite(xaxiemacp,phy_addr,IEEE_PAGE_ADDRESS_REGISTER,0);
XAxiEthernet_PhyRead(xaxiemacp,phy_addr,IEEE_COPPER_SPECIFIC_CONTROL_REG,
&control);
control|=(7<<12); /* max number of gigabit attempts */
control |=(1<<11); /* enable downshift */
XAxiEthernet_PhyWrite(xaxiemacp, phy_addr, IEEE_COPPER_SPECIFIC_CONTROL_REG,
control);
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_CONTROL_REG_OFFSET,&control);
control |= IEEE_CTRL_AUTONEGOTIATE_ENABLE;
control |= IEEE_STAT_AUTONEGOTIATE_RESTART;
XAxiEthernet_PhyWrite(xaxiemacp, phy_addr, IEEE_CONTROL_REG_OFFSET, control);
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_CONTROL_REG_OFFSET,&control);
control |= IEEE_CTRL_RESET_MASK;
XAxiEthernet_PhyWrite(xaxiemacp, phy_addr, IEEE_CONTROL_REG_OFFSET, control);
while(1){
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_CONTROL_REG_OFFSET,&control);
if(control & IEEE_CTRL_RESET_MASK)
continue;
else
break;
}
xil_printf("Waiting for PHY to complete autonegotiation.\r\n");
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_STATUS_REG_OFFSET,&status);
while(!(status & IEEE_STAT_AUTONEGOTIATE_COMPLETE)){
sleep(1);
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_STATUS_REG_OFFSET,
&status);
}
xil_printf("autonegotiation complete \r\n");
XAxiEthernet_PhyRead(xaxiemacp, phy_addr,0x1f,&partner_capabilities);
if((partner_capabilities &0x40)==0x40)/* 1000Mbps */
return1000;
elseif((partner_capabilities &0x20)==0x20)/* 100Mbps */
return100;
elseif((partner_capabilities &0x10)==0x10)/* 10Mbps */
return10;
else
return0;}
5) 修改函数“get_IEEE_phy_speed”,添加对KSZ9031的支持。
unsignedget_IEEE_phy_speed(XAxiEthernet*xaxiemacp){
u16phy_identifier;
u16phy_model;
u8phytype;#ifdefXPAR_AXIETHERNET_0_BASEADDR
u32phy_addr=detect_phy(xaxiemacp);
/*GetthePHYIdentifierandModelnumber*/
XAxiEthernet_PhyRead(xaxiemacp,phy_addr,PHY_IDENTIFIER_1_REG,&phy_identifier);
XAxiEthernet_PhyRead(xaxiemacp,phy_addr,PHY_IDENTIFIER_2_REG,&phy_model);/*DependinguponwhatmanufacturerPHYisconnected,adifferentmaskis*neededtodeterminethespecificmodelnumberofthePHY.*/
if(phy_identifier==MARVEL_PHY_IDENTIFIER){
phy_model=phy_model&MARVEL_PHY_MODEL_NUM_MASK;
if(phy_model==MARVEL_PHY_88E1116R_MODEL){
returnget_phy_speed_88E1116R(xaxiemacp,phy_addr);
}elseif(phy_model==MARVEL_PHY_88E1111_MODEL){
returnget_phy_speed_88E1111(xaxiemacp,phy_addr);
}
}elseif(phy_identifier==TI_PHY_IDENTIFIER){
phy_model=phy_model&TI_PHY_DP83867_MODEL;
phytype=XAxiEthernet_GetPhysicalInterface(xaxiemacp);
if(phy_model==TI_PHY_DP83867_MODEL&&phytype==XAE_PHY_TYPE_SGMII){
returnget_phy_speed_TI_DP83867_SGMII(xaxiemacp,phy_addr);
}
if(phy_model==TI_PHY_DP83867_MODEL){
returnget_phy_speed_TI_DP83867(xaxiemacp,phy_addr);
}
}
elseif(phy_identifier==MICREL_PHY_IDENTIFIER)
{
xil_printf("Phy%disKSZ9031\n\r",phy_addr);
get_phy_speed_ksz9031(xaxiemacp,phy_addr);
}
else{
LWIP_DEBUGF(NETIF_DEBUG,("XAxiEthernetget_IEEE_phy_speed:DetectedPHYwithunknownidentifier/model.\r\n"));
}#endif#ifdefPCM_PMA_CORE_PRESENT
returnget_phy_negotiated_speed(xaxiemacp,phy_addr);#endif}
6) 修改PS端“xemacpsif_physpeed.c”文件添加宏定义
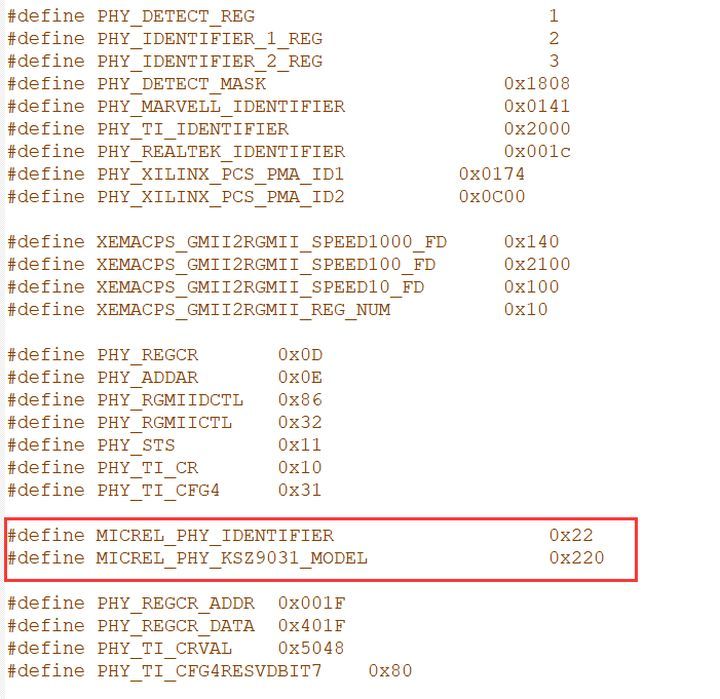
7) 添加phy速度获取函数
staticu32_tget_phy_speed_ksz9031(XEmacPs*xemacpsp,u32_tphy_addr){
u16_ttemp;
u16_tcontrol;
u16_tstatus;
u16_tstatus_speed;
u32_ttimeout_counter=0;
u32_ttemp_speed;
u32_tphyregtemp;
xil_printf("StartPHYautonegotiation\r\n");
XEmacPs_PhyWrite(xemacpsp,phy_addr,IEEE_PAGE_ADDRESS_REGISTER,2);
XEmacPs_PhyRead(xemacpsp,phy_addr,IEEE_CONTROL_REG_MAC,&control);
control|=IEEE_RGMII_TXRX_CLOCK_DELAYED_MASK;
XEmacPs_PhyWrite(xemacpsp,phy_addr,IEEE_CONTROL_REG_MAC,control);
XEmacPs_PhyWrite(xemacpsp,phy_addr,IEEE_PAGE_ADDRESS_REGISTER,0);
XEmacPs_PhyRead(xemacpsp,phy_addr,IEEE_AUTONEGO_ADVERTISE_REG,&control);
control|=IEEE_ASYMMETRIC_PAUSE_MASK;
control|=IEEE_PAUSE_MASK;
control|=ADVERTISE_100;
control|=ADVERTISE_10;
XEmacPs_PhyWrite(xemacpsp,phy_addr,IEEE_AUTONEGO_ADVERTISE_REG,control);
XEmacPs_PhyRead(xemacpsp,phy_addr,IEEE_1000_ADVERTISE_REG_OFFSET,
&control);
control|=ADVERTISE_1000;
XEmacPs_PhyWrite(xemacpsp,phy_addr,IEEE_1000_ADVERTISE_REG_OFFSET,
control);
XEmacPs_PhyWrite(xemacpsp,phy_addr,IEEE_PAGE_ADDRESS_REGISTER,0);
XEmacPs_PhyRead(xemacpsp,phy_addr,IEEE_COPPER_SPECIFIC_CONTROL_REG,
&control);
control|=(7<<12); /* max number of gigabit attempts */
control |=(1<<11); /* enable downshift */
XEmacPs_PhyWrite(xemacpsp, phy_addr, IEEE_COPPER_SPECIFIC_CONTROL_REG,
control);
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_CONTROL_REG_OFFSET,&control);
control |= IEEE_CTRL_AUTONEGOTIATE_ENABLE;
control |= IEEE_STAT_AUTONEGOTIATE_RESTART;
XEmacPs_PhyWrite(xemacpsp, phy_addr, IEEE_CONTROL_REG_OFFSET, control);
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_CONTROL_REG_OFFSET,&control);
control |= IEEE_CTRL_RESET_MASK;
XEmacPs_PhyWrite(xemacpsp, phy_addr, IEEE_CONTROL_REG_OFFSET, control);
while(1){
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_CONTROL_REG_OFFSET,&control);
if(control & IEEE_CTRL_RESET_MASK)
continue;
else
break;
}
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_STATUS_REG_OFFSET,&status);
xil_printf("Waiting for PHY to complete autonegotiation.\r\n");
while(!(status & IEEE_STAT_AUTONEGOTIATE_COMPLETE)){
sleep(1);
XEmacPs_PhyRead(xemacpsp, phy_addr,
IEEE_COPPER_SPECIFIC_STATUS_REG_2,&temp);
timeout_counter++;
if(timeout_counter ==30){
xil_printf("Auto negotiation error \r\n");
return;
}
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_STATUS_REG_OFFSET,&status);
}
xil_printf("autonegotiation complete \r\n");
XEmacPs_PhyRead(xemacpsp, phy_addr,0x1f,
&status_speed);
if((status_speed &0x40)==0x40)/* 1000Mbps */
return1000;
elseif((status_speed &0x20)==0x20)/* 100Mbps */
return100;
elseif((status_speed &0x10)==0x10)/* 10Mbps */
return10;
else
return0;
return XST_SUCCESS;}
8)修改函数“get_IEEE_phy_speed”,添加对KSZ9031的支持
staticu32_tget_IEEE_phy_speed(XEmacPs*xemacpsp,u32_tphy_addr){
u16_tphy_identity;
u32_tRetStatus;
XEmacPs_PhyRead(xemacpsp,phy_addr,PHY_IDENTIFIER_1_REG,
&phy_identity);
if(phy_identity==MICREL_PHY_IDENTIFIER){
RetStatus=get_phy_speed_ksz9031(xemacpsp,phy_addr);
}elseif(phy_identity==PHY_TI_IDENTIFIER){
RetStatus=get_TI_phy_speed(xemacpsp,phy_addr);
}elseif(phy_identity==PHY_REALTEK_IDENTIFIER){
RetStatus=get_Realtek_phy_speed(xemacpsp,phy_addr);
}else{
RetStatus=get_Marvell_phy_speed(xemacpsp,phy_addr);
}
returnRetStatus;}
1.2 创建APP工程时基于LWIP模板
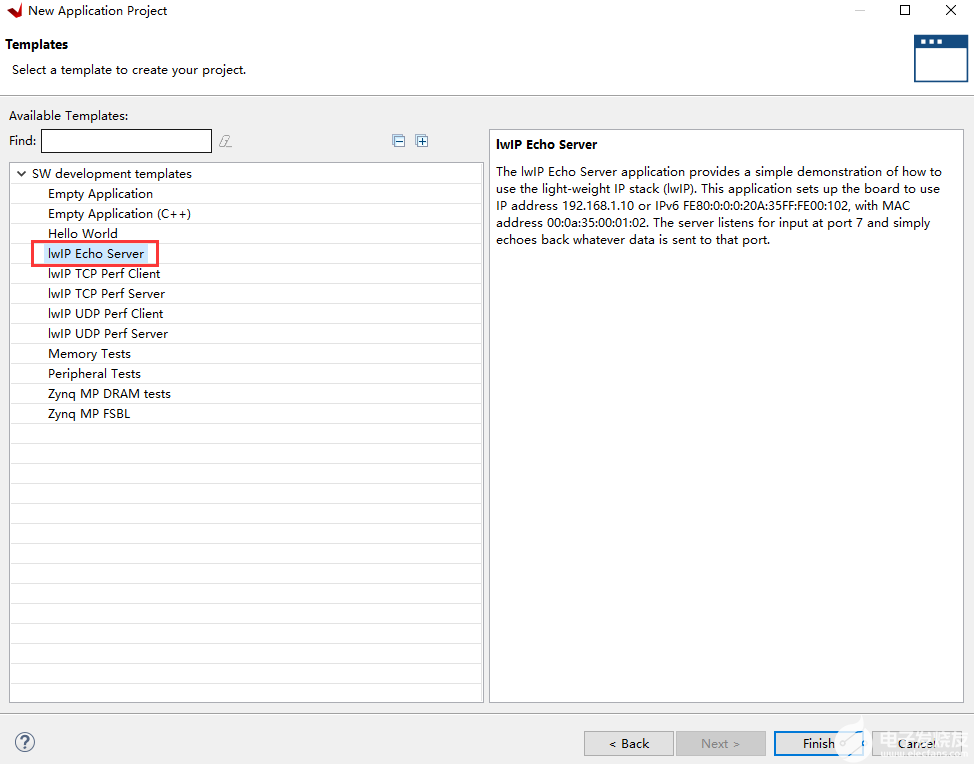
测试环境要求有一台支持dhcp的路由器,开发板连接路由器可以自动获取IP地址,实验主机和开发板在一个网络,可以相互通信。
2.1 以太网测试
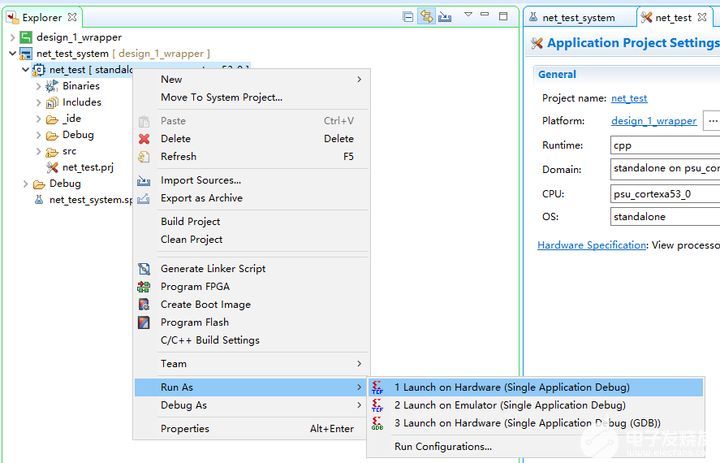
1) 连接串口打开串口调试终端,连接好PS端以太网网线到路由器,运行Vitis下载程序
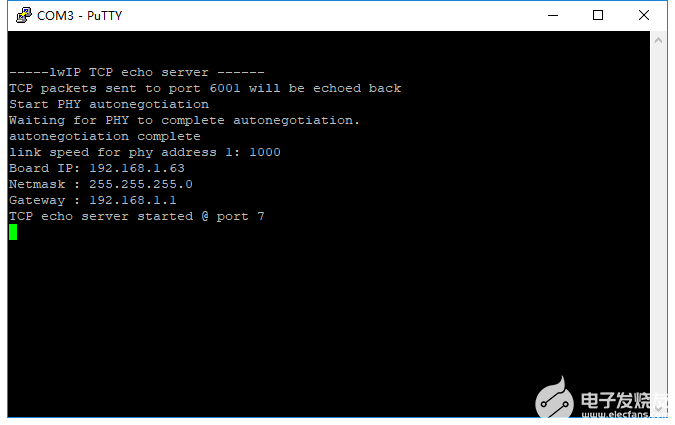
2)可以看到串口打印出一些信息,可以看到自动获取到地址为“192.168.1.63”,连接速度1000Mbps,tcp端口为7
3) 使用telnet连接
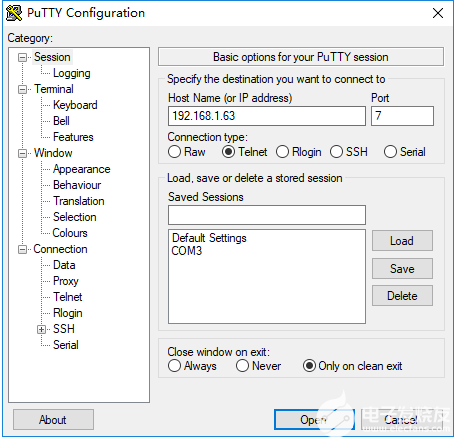
4) 当输入一个字符时,开发板返回相同字符
通过实验我们更加深刻了解到Vitis程序的开发,本实验只是简单的讲解如何创建一个LWIP应用,LWIP可以完成UDP、TCP等协议,在后续的教程中我们会提供基于以太网的具体应用,例如ADC采集数据通过以太网发送,摄像头数据通过以太网发送上位机显示。

Fidus Sidewinder-100集成PCIe NVMe 控制系统,有
 关注微信
关注微信