时间:2023-09-07 09:03
人气:
作者:admin
今天和大家分享一颗电机控制芯片,随着芯片功能的不断强大,现在芯片的集成度越来越高,很多以前分离电路的能力逐步开始过度到集成电路。模块化的集成电路在成本和设计复杂度上都大大降低,而对IC设计人员的要求也逐步提高。今天和大家分享一颗双路电机驱动芯片LV8548MC,借助这颗芯片我们也可以了解一些关于电机控制的知识。
1.芯片基本特性
LV8548MC是一颗驱动电机正反转控制的芯片,典型电压值为12V,具有2个通道,使用2个H桥,分别驱动2个外部电机正反转。兼容LB1948MC芯片,最高输出电流1A,在静态工作模式下,电流消耗可以达到0A,内置刹车功能。芯片采用SOIC10封装,工作温度范围-30到85度。这里注意下,不是工业级的-40到85度。
2.芯片的主要应用
(1)工业自动化:LV8548MC可以用于控制工业机械中的直流电机应用,如自动装配线、包装设备等。
(2)机器人技术:LV8548MC可以应用于各种类型的机器人,包括工业机器人、服务机器人、家庭机器人等,用于控制机器人的运动和定位。
(3)医疗设备:LV8548MC可以用于医疗设备中的电机驱动,如医疗机器人、医疗影像设备等。
(4)智能家居:LV8548MC可用于智能家居系统,如智能窗帘、智能门锁等,实现电机的控制和自动化。
3.芯片引脚定义及设计要点
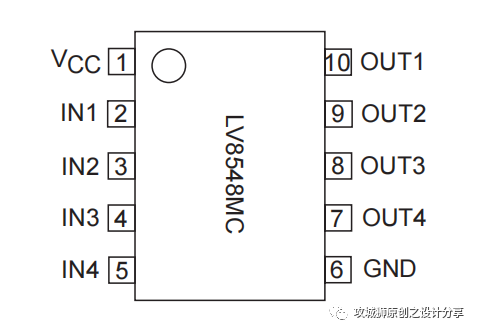
1.VCC:功率电输入引脚,支持4.0-16V电压输入,典型值一般为5V和12V系统功率电源。
2.IN1:和IN2作为芯片的逻辑输入,通过芯片内部的逻辑转换和H桥电路控制OUT1和OUT2输出状态,OUT1和OUT2连接电机的接口,控制正反转。
3.IN2:和IN1作为芯片的逻辑输入,通过芯片内部的逻辑转换和H桥电路控制OUT1和OUT2输出状态,OUT1和OUT2连接电机的接口,控制正反转。
4.IN3:和IN4作为芯片的逻辑输入,通过芯片内部的逻辑转换和H桥电路控制OUT3和OUT4输出状态,OUT3和OUT4连接电机1的接口,控制电机1正反转。
5.IN4:和IN3作为芯片的逻辑输入,通过芯片内部的逻辑转换和H桥电路控制OUT3和OUT4输出状态,OUT3和OUT4连接电机2的接口,控制电机2正反转。
6.GND:电源的GND引脚
7.OUT4:输出引脚4,与OUT3组合控制电机2(输入控制源为IN3和IN4),OUT3和OUT4分别连接电机1的2个供电端子,控制电机2正反转。
8.OUT3:输出引脚3,与OUT4组合控制电机2(输入控制源为IN3和IN4),OUT3和OUT4分别连接电机2的2个供电端子,控制电机2正反转。
9.OUT2:输出引脚2,与OUT1组合控制电机1(输入控制源为IN1和IN2),OUT1和OUT2分别连接电机1的2个供电端子,控制电机1正反转。
10.OUT1:输出引脚1,与OUT2组合控制电机1(输入控制源为IN1和IN2),OUT1和OUT2分别连接电机1的2个供电端子,控制电机1正反转。
设计注意事项:
(1) 在电源VCC的供电端要增加滤波电容,容值推荐100nf到10uf,建议在设计之初二者并联使用。
(2)当IN1,IN2,IN3,IN4同时拉低时,芯片进入静态模式,同时电流消耗降低到0,且4个输入引脚在芯片内部均集成了下拉电阻,保持默认状态不输出。
(3)芯片集成热关断保护,阈值为结温超过180度,但是在设计时,要考虑超过150度时,芯片已经不能保证产品的完整性,因此,设计最高限值不要达到150度,实际设计,应该在150度以下。
(4)虽然VCC可以支持12V,但是IN1,IN2,IN3,IN4输入电压不能超过5.5V,会损坏这四个输入引脚。
(5)逻辑真值表:

根据真值表,可以看出两个通道的电机均可以工作在4个状态,stand-by,forward,reverse,brake四个状态,IN1和IN2控制通道1电机,IN3和IN4控制通道2电机,通过IN信号输入,就可以通过查表得到OUT信号的输出,从而推断对应通道电机的状态。注意当IN1,IN2,IN3,IN4同时为低电平时,芯片整体处于stand-by模式。
下面以IN1和IN2分析控制电机1的四个状态:
IN1为低电平,IN2为低电平时,电机1是静态stand-by模式;
IN1为高电平,IN2为低电平时,电机1是正转forward模式;
IN1为低电平,IN2为高电平时,电机1是反转reverse模式;
IN1为高电平,IN2为高电平时,电机1是刹车brake模式;
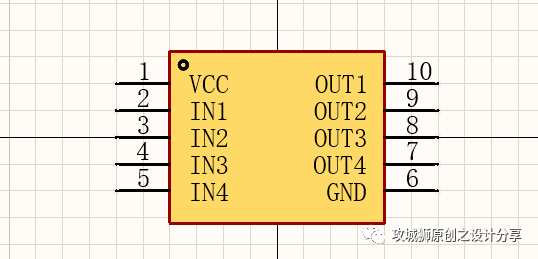
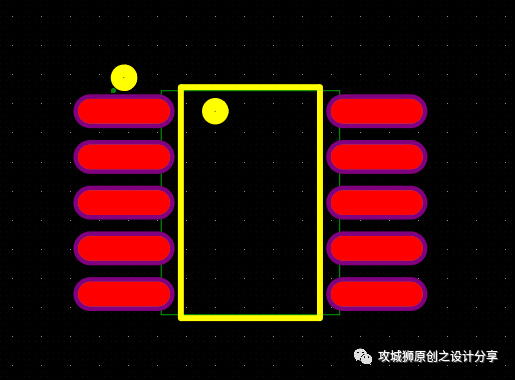
4.原理图和PCB封装
审核编辑:刘清
下一篇:SPI接口入门指南

从profibusDP转ModbusTCP,一网打尽转换技巧!



 关注微信
关注微信