时间:2023-05-25 14:34
人气:
作者:admin
在配置和添加某些品牌的EtherCAT总线伺服驱动器或者步进时,会出现轴无法使能,或者不能使用MC功能块控制其正常运动的情况。
在这里说明第三方品牌伺服,主要指的是CODESYS列表里不存在的品牌,那么安装完成后,有哪些品牌是软件里预安装的呢?主要是一些国际知名的主流品牌:
当然,就算是以上品牌的也并不一定能够正常使用,需要按照以下步骤进行。

详细步骤
Step1:安装XML设备描述文件
打开IDE,在菜单栏:CODESYS —> Tools(工具)—> Device repository(设备管理器)—>Install,如下图所示:
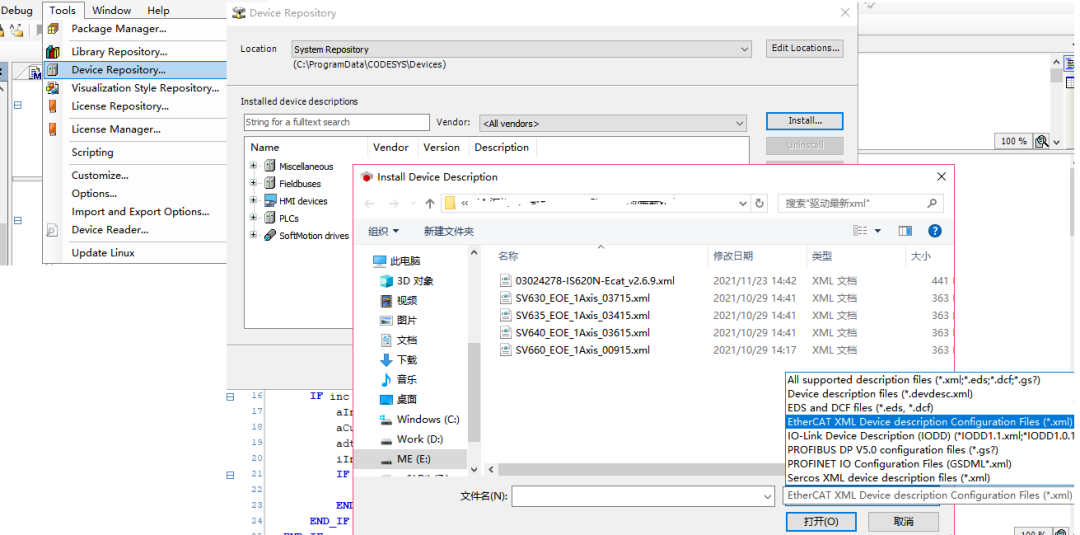
特别注意设置添加文件类型为:EtherCAT XML Device description Configuration Files(*.xml)
一般的,完成安装后,就可以通过扫描设备或者添加设备,找到刚安装的EtherCAT总线伺服。到此就已经完成总线伺服的硬件配置。

进一步配置
如果按上述不能正常控制设备,那么可以尝试以下步骤:
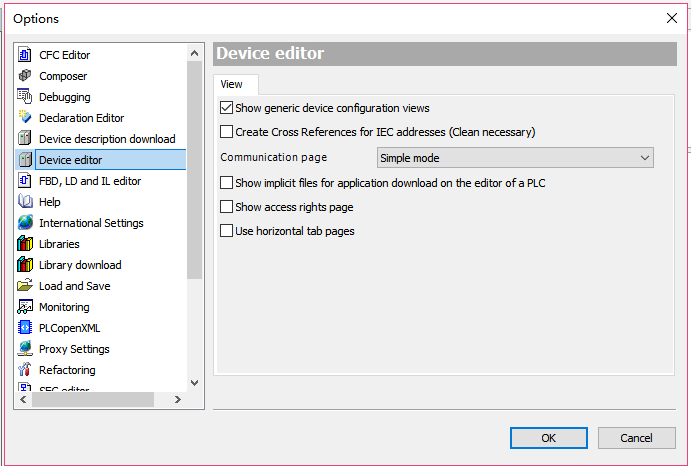
Step2: 开启设备编辑高级选项
打开IDE,菜单栏找到 Tools(工具) —> Options(选项) —> Device editor —> 勾选 Show generic device configuration views
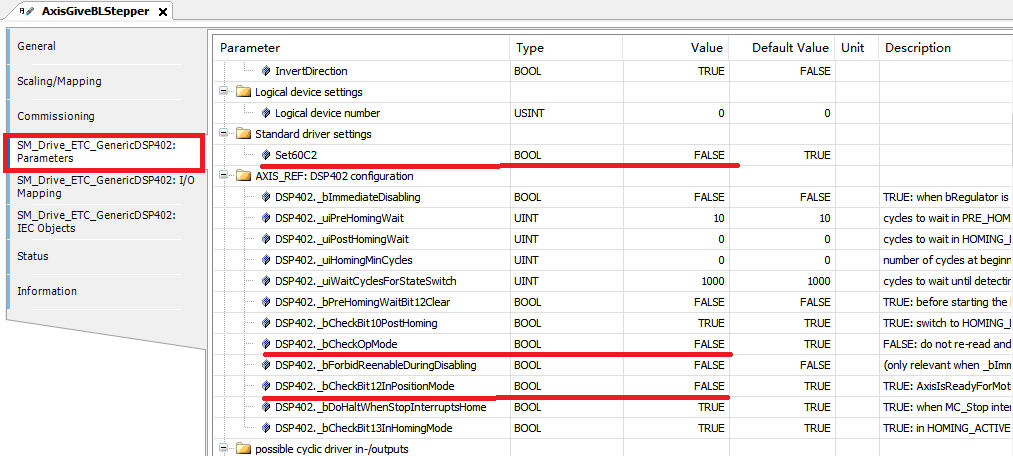
Step3:对 SM_Drive_GenericDSP402 轴参数进行设置
在添加伺服下方配置的SM_Drive_GenericDSP402轴参数:
Standard driver settings:
Set60C2 ——> FALSE
AXIS_REF:DSP402 configuration
DSP402._bCheckOpMode ——> FALSE
DSP402._bCheckBit12InPositionMode ——> FALSE
Step4:startup启动参数
对于部分伺服或总线步进无法使能等情况,还需确认驱动的startup Parameter参数是否添加正确:
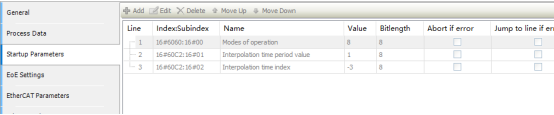
主要针对opmode的设置和伺服驱动内部的 Interpolation time period value这两项配置,是否与EtherCAT Master的Task任务周期一致,对应已经预设正确的伺服可以忽略此步骤。

从profibusDP转ModbusTCP,一网打尽转换技巧!



 关注微信
关注微信