时间:2017-02-10 14:13
人气:
作者:admin
面向电机和功率级动态特性的高级建模技术可以大幅提高电机控制效率,确保根据系统行为的实时变动实行精密控制。通过无传感器矢量控制技术,设计人员可以增强电机系统的性能,降低功耗,并且符合旨在提高能效的新法规要求。基于新一代数字信号处理技术的新型电机控制方案有望加速先进控制方案的运用。
在过去十年中,随着永磁体材料的不断发展和勘测到的资源越来越容易开采,采用永磁体同步电机(PMSM)的工业应用高性能变速电机越来越多。使用PMSM驱动的先天优势包括:高扭矩重量比、高功率因数、响应更快、结实耐用的构造、易于维护、易于控制以及高效率。高性能速度
和/或位置控制要求准确判定转轴位置和速度,使相位激励脉冲与转子位置同步。 因而电机轴上需安装绝对编码器和磁性旋转变压器等速度和位置传感器。然而,在大多数应用中,这些传感器会带来多种弊端,例如:可靠性递减,易受噪声影响,成本和重量增加,以及驱动系统更复杂
等。无传感器矢量控制则不需要速度/位置传感器,因而这些问题也就不复存在。
近年来,关于PMSM的无传感器速度和位置控制方法,研究文献中提出多种解决方案。 针对PMSM驱动的无传感器转子位置估计,已开发出三种基本技术:
基于反电动势(BEMF)估计的各种技术
基于状态观测器和扩展卡尔曼滤波器(EKF)的技术
基于实时电机建模的其他技术
基于反电动势技术的位置估计根据电压和电流估计磁通量和速度。在较低速度范围内,这种技术对定子电阻特别敏感。由于机器的反电动势很小,并且开关设备的非线性特征会产生系统噪声,因此很难得到关于机器终端的实际电压信息。在中高速范围内,利用反电动势方法可以获得较
好的位置估计,但在低速范围内则不行。
反电动势电压的幅度与转子转速成比例,因此静止时无法估计初始位置。所以,从未知转子位置启动可能伴随着暂时反向旋转,或者可能导致启动故障。EKF能够对随机噪声环境中的非线性系统执行状态估计,因而对于PMSM的速度和转子位置估计,似乎是可行且具计算效率的候选方法。
基于空间显著性跟踪的技术利用磁显著性,适合零速工作,可以估计初始转子位置,而不会受其它参数影响。针对初始转子位置,主要有两种基本方法,分别基于脉冲信号注入和正弦载波信号注入。
我们看一个例子。
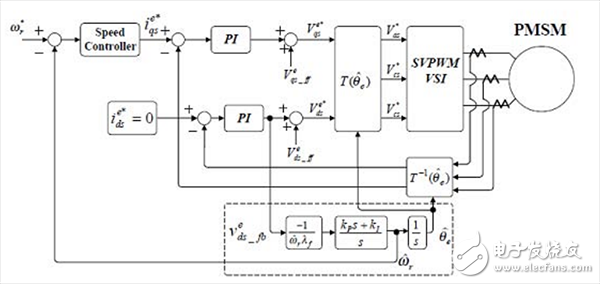
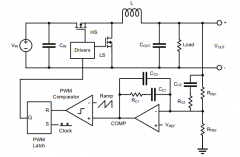
图1为无传感器矢量控制方案的框图,其中不含位置传感器。框图中,轴间控制的正馈项Vds_和Vqs_可以表示为:
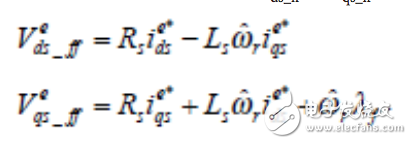
其中,ωr
为转子的转速。
只看内置式PMSM (IPMSM)的标准电压公式,坐标系可以表
示为:
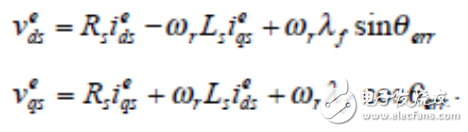
其中,θerr为实际角度与估计角度之间的差值。
现在重新定位d轴,可以得到:
假定电流PI调整器将产生小误差,θerr很小,d轴可以表示为:
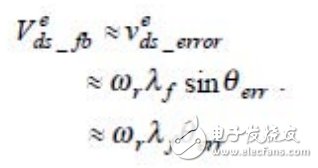
在图1的建议估计器及所导出的公式中,误差信号Vds_error由PI补偿器处理,以导出转子的转速,而转子的角度则通过对估计的速度进行积分而算得。其它常见方法用微分法计算速度,但这会使系统易受噪声影响。Bon-Ho Bae的实验研究表明,建议估计器能够为应用提供非常准确且可靠的速度信息。但在零速和低速时,反电动势电压不够高,无法用于所建议的矢量控制。因此,对于从零速度开始的无缝操作,估计器利用恒定幅度和预定模式频率来控制电流。这里,同步坐标系的角度通过对频率进行积分而导出(初始启动方法)。
下一篇:用于电机控制系统与设计(2)




 关注微信
关注微信