时间:2025-08-14 15:44
人气:
作者:admin
ROS 2(Robot Operating System 2)是机器人操作系统(ROS)的升级版,是一套开源的专为机器人开发而设计的软件库与工具集。作为构建机器人应用的强大框架,提供从硬件驱动到先进算法的一站式解决方案,同时辅以功能强大的开发工具,助力工程师与研究人员高效完成项目开发。ROS 2 在实时性、安全性、灵活性和跨平台支持等方面进行了显著的改进,为现代机器人开发提供了一个更加高效和可靠的软件框架。
大型实时操作系统SylixOS 现已完成了对 ROS 2 的适配,硬实时操作系统配合 ROS 2 强大的功能,可以为机器人制造商提供更多场景落地的可能性。
ROS 2 for SylixOS 具备以下优势
SylixOS 为100% 国产化系统,底层使用全国产化平台,且支持丰富的国产硬件平台,符合自主可控要求。
基于硬实时操作系统运行 ROS 2,具有极高的实时性和确定性,通信延迟抖动小于 3μs(相比之下,Linux 同硬件平台实测为 90μs),满足高实时性要求场景。
实现开发环境与运行环境解耦,运行环境轻量,仅需1GB 存储空间和 300MB内存,适用于资源受限场景。
可结合翼辉 ACU(智能算控单元),软硬一体,加速产品落地。想了解更多 ACU 介绍,点击查看
底层系统由商业公司维护,可提供更加全面的服务与技术支持。
SylixOS 已在航空航天、轨道交通等高端工业领域实现规模化应用,其成熟的工业级外设驱动框架具备微秒级任务切换与纳秒级中断响应能力,可直接对接 ROS 2 的硬件控制节点,显著提升机器人硬件集成效率。
可快速接入翼辉技术体系,获得一站式便捷、高效的软件开发体验,如翼辉云枢(现代化开发流水线)、ARMORY (软件管理工具)、VSOA(分布式软总线) 等。想了解现代化软件工厂翼辉云枢可点击查看
RealEvo-Stream集成了ROS 2开发组件,用户能够利用RealEvo-Stream快速高效地开发SylixOS下的ROS 2应用,下面将展示如何使用RealEvo-Stream快速开发、部署和运行ROS 2应用。
快速搭建开发环境
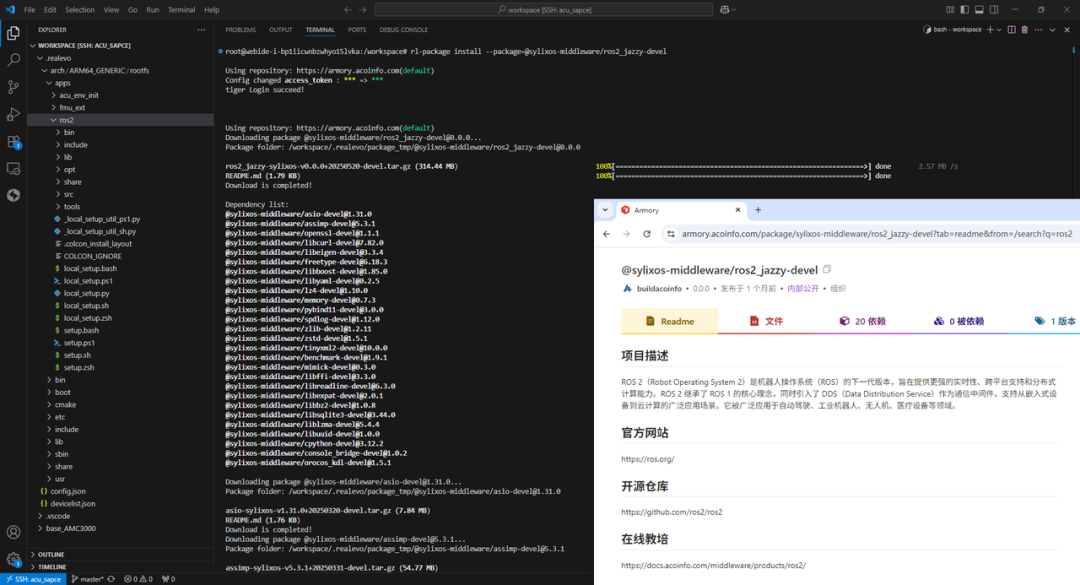
在 Linux 平台,ROS 2 的版本通常与所使用的操作系统发行版以及开发环境紧密绑定,开发环境与运行环境需保持一致,缺乏灵活性。相比之下,ROS 2 for SylixOS 不存在此类强依赖问题。借助 RealEvo-Stream,开发者可在当前工作空间中一键安装所需的 ROS 2 开发环境,每个工作空间相互独立、版本隔离,互不干扰。下图展示 ROS 2 for SylixOS 开发环境安装过程。
兼容 ROS 2 官方工具集开发方式
RealEvo-Stream 提供图形化界面,便捷创建 ROS 2 工程,摆脱命令行操作。在工程创建完成后,开发方式与官方 ROS 2 保持兼容,开发者无需改变原有开发习惯。RealEvo-Stream 内置并封装了 ROS 2 构建系统,支持交叉编译,能够自动处理构建过程中涉及的编译命令与环境变量差异,大幅简化异构平台下的开发流程。下图展示 ROS 2 for SylixOS 工程创建、包创建以及构建过程。

一键部署 ROS 2 运行环境
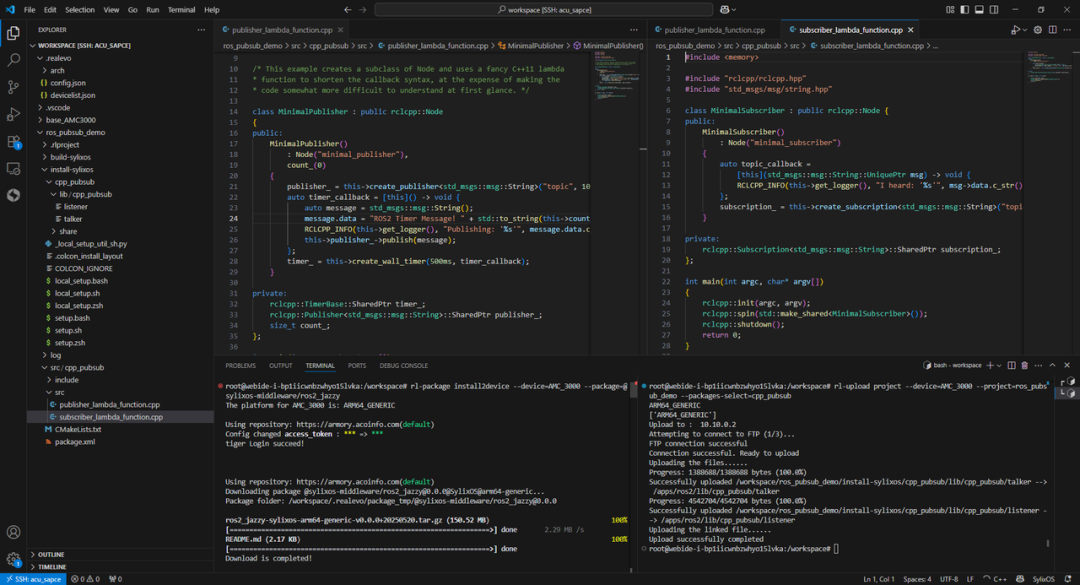
RealEvo-Stream 支持 ROS 2 运行环境的一键部署。与其他 SylixOS 生态组件一样,ROS 2 的开发包与运行包统一发布在翼辉 ARMORY 制品仓库中,用户可通过 RealEvo-Stream 快速获取并部署到目标设备,支持本地及云端的无感知部署。设备运行环境初始化完成后,用户可将应用程序一键部署至设备,既可选择部署完整工程,也可仅部署指定功能包,灵活高效。
ROS 2 运行
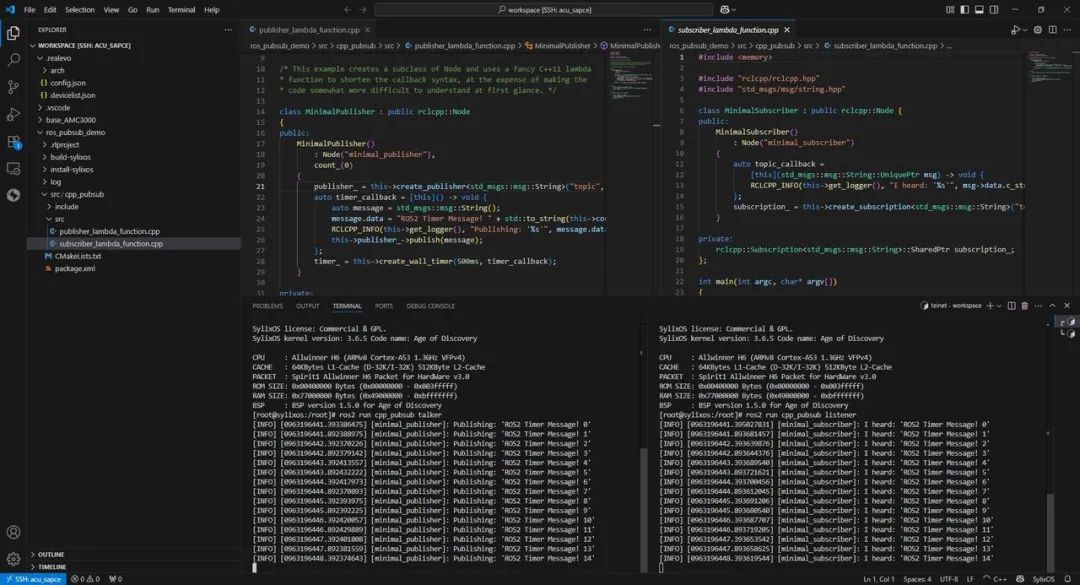
SylixOS 下的 ROS 2 运行环境兼容官方运行时命令集,支持节点管理、主题管理、消息监控等核心功能。ROS 2 for SylixOS 支持 Python 3 和 C/C++ 多语言开发,可实现跨语言节点通信,同时提供包括 UDP 与共享内存在内的多种高效通信机制。下图展示一个简单的 ROS 2 节点间通信实例。
RealEvo-Stream 轻量化开发环境,更加注重与各行业的深度融合。随着产品持续迭代,将不断提升对 ROS 2 等行业框架的支持。凭借良好的可扩展性,RealEvo-Stream 将进一步拓展至机器人、工业控制、智能交通等多个领域,为行业开发者提供高效、专业的开发支持。
如果你是
· 嵌入式开发者:无需关心操作系统差异,跨平台应用一键适配,专注业务逻辑开发。
· 团队技术主管:快速搭建技术栈高度兼容的多人协作开发环境,减少学习成本,助力团队高效开发。
· 企业决策者:软硬一体方案降低综合成本,抢占市场先机。





 关注微信
关注微信