时间:2022-10-10 18:15
人气:
作者:admin
如何低成本搭建ARM+ROS的硬件载体?上文展示ROS部署前的筹备工作及步骤分解,本文将为大家演示ROS的移植及测试方法。
经过前面的环境搭建,HDG2L-IoT评估套件已经能稳定地运行Ubuntu+docker环境,当前需要下载运行ROS镜像即可。
本文参考ROS官方文档《Getting started with ROS and Docker》,结合我司的HDG2L-IoT评估套件实现ROS方案完全搭建流程,参考网址如下所示。

目前docker官网提供了搭建好的ROS镜像(支持arm64架构),网址为:

如下所示。
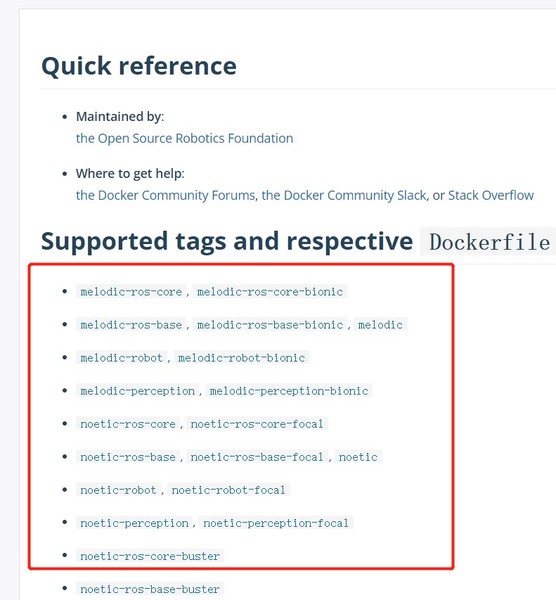
下载命令如下所示,填入上图的字符串。

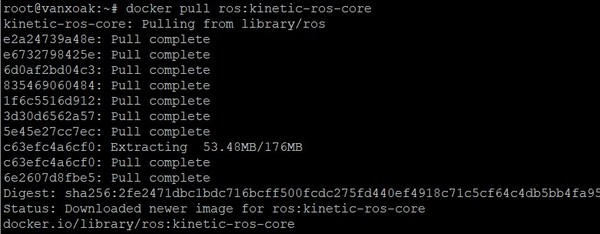
根据项目需求选择合适的ROS镜像,本例以kinetic-ros-core为例,下载命令如下所示。

下载完成如下图所示:
查看镜像的命令:

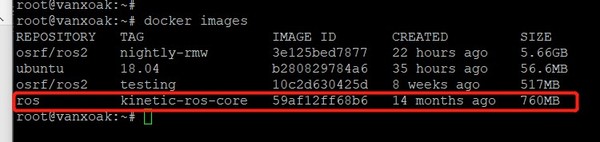
使用下载下来的ROS镜像来启动容器,命令如下所示。

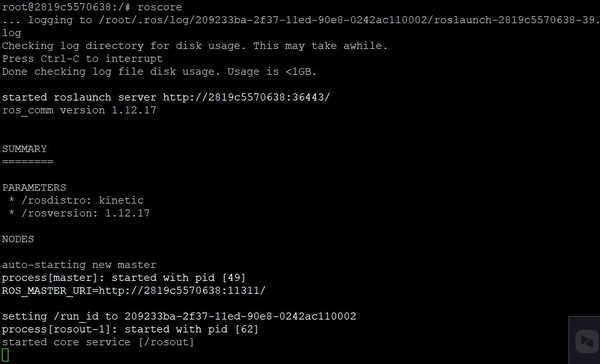
以终端模式进入ROS容器。
进入后运行roscore来启动运行ros节点必要的ROS Master和ROS parameter,运行情况如下所示。
至此,我们通过三篇文章从硬件与底层、环境搭建、ROS运行等方面为大家介绍了一个全新的ARM+ROS的软硬件实现方案。文章中若有不明之处或需要技术问题交流请随时联系万象奥科官方。





 关注微信
关注微信