时间:2023-09-06 09:40
人气:
作者:admin
[ 导读] 本文通过阅读内核代码,来梳理一下I2C子系统的整体视图。在开发I2C设备驱动程序时,往往缺乏对于系统整体的认识,没有一个清晰的思路。所以从高层级来分析一下I2C系统的设计思路,将有助于设计调试具体的驱动程序。
I2C/SMBUS基础
I2C是一种芯片间通讯总线技术,最早由Philips设计制定。下面内容参考I2C 2.1 规格书
半双工通信方式,通信采用主/从结构
支持多主模式,下图来源于I2C 2.1规格书
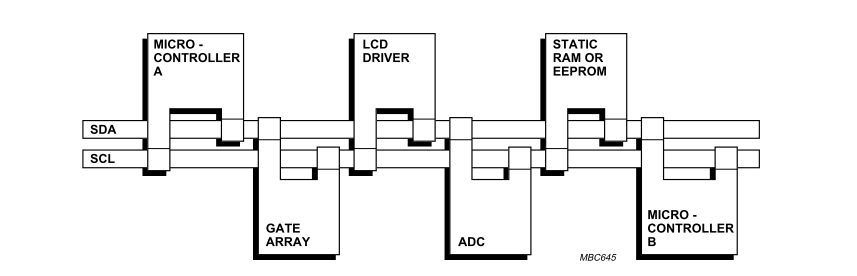
其内部电气实现采用集电极开路(Open-collector)/漏极开路(open-drain)结构以实现线与功能,这是总线的实现基础,多芯片通过查询总线状态实现介质仲裁以实现总线控制。
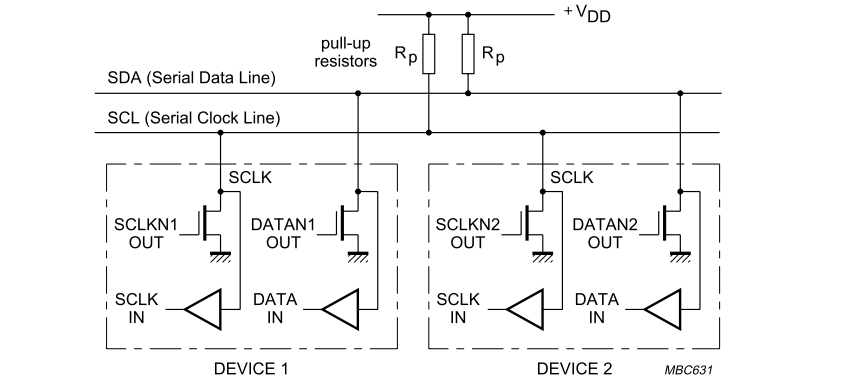
总线信号由两线实现,串行时钟线SCL(Serial Clock Line)/串行数据线SDA(serial Data Line)。
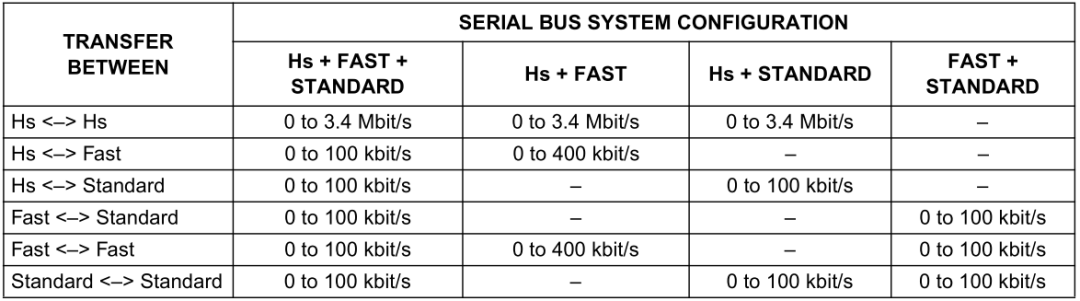
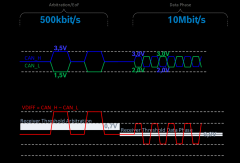
具有三种通讯速率模式:
standard mode:0-100 kbps (bps: bit/s)
Fast mode:0-400 kbps
High-speed mode : 0-3.4Mbps
可支持混速模式
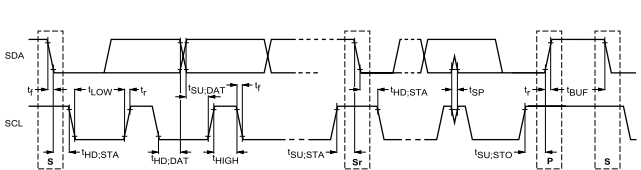
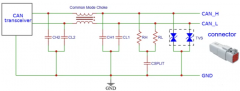
不同的速率在硬件设计时需要注意信号的完整性,I2C总线等效电容Cx,主要需要考虑PCB布线,以及上拉电阻选取。
支持7bit/10bit 两种芯片地址模式
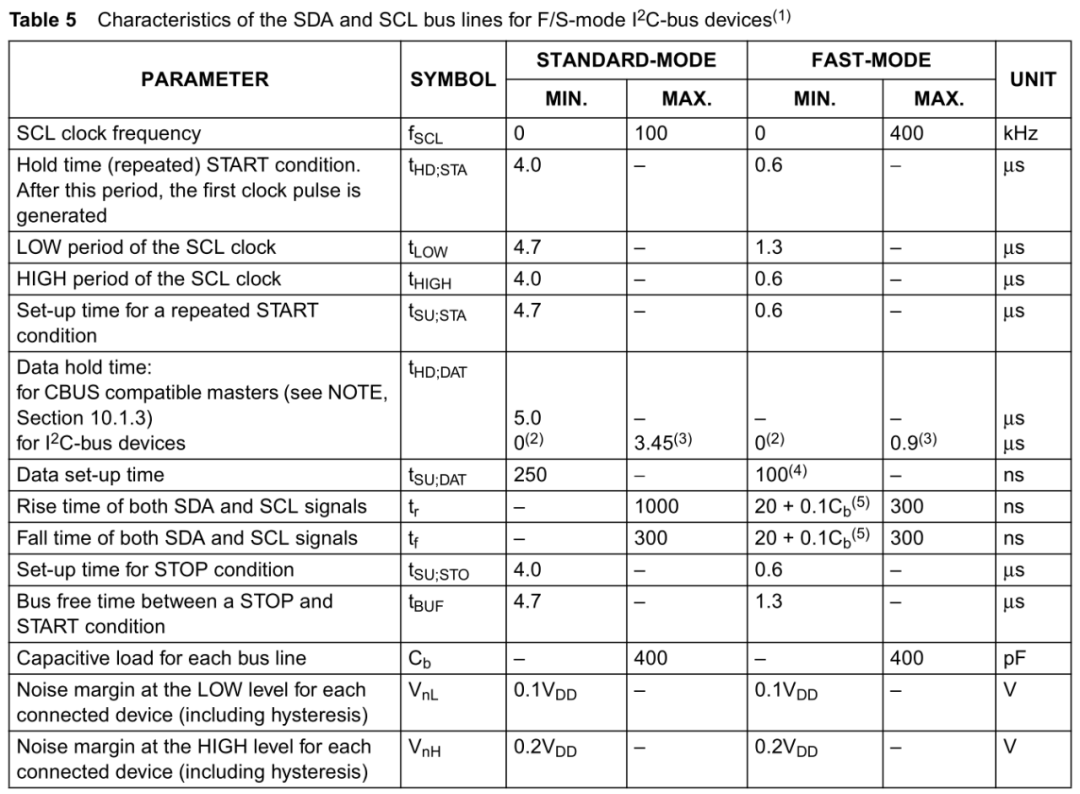
I2C总线电气特性,这个非常重要,须严格遵守标准的电气特性
SMBUS(system management bus) 。大多数SMBus系统也符合I2C,电气约束对于SMBus更为严格,并且它标准化了特定的协议消息和习惯用语。支持I2C的控制器也可以支持大多数SMBus操作,但是SMBus控制器并不支持I2C控制器将支持的所有协议选项。通过使用I2C原语或通过向不支持这些I2C操作的i2c_adapter设备发出SMBus命令,可以执行各种SMBus协议操作。
I2C bus(Inter-Integrated Circuit bus) https://www.i2c-bus.org/
I2C 在Linux设备中的拓扑结构
在PC体系中,大体如下拓扑:
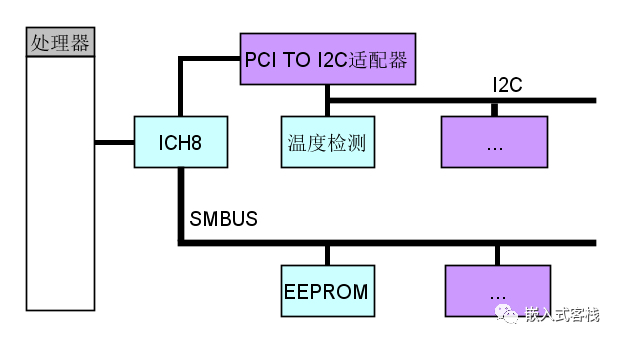
PC体系中通过桥接芯片,扩展出PCI,在由PCI扩展出I2C适配器,进而得到I2C总线,或者桥接芯片直接扩展出SMBUS/I2C总线。
在嵌入式应用中,则可能为:
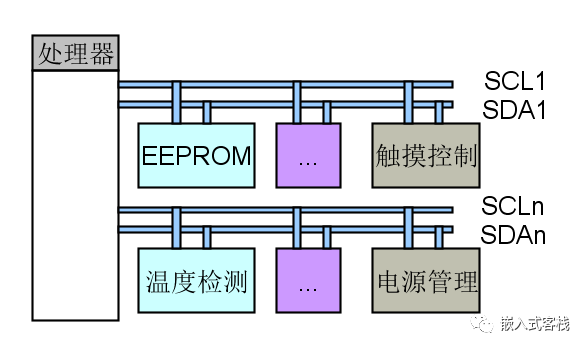
嵌入式应用中,则可能更多的情况是处理器内置了I2C/SMBUS总线控制器,直接可得到I2C/SMBUS总线。嵌入式系统中常常会设计很多传感器挂载在I2C总线上,比如温度检测,压力检测等等,又或者诸如电容触摸屏、电源管理IC等等。
代码实现
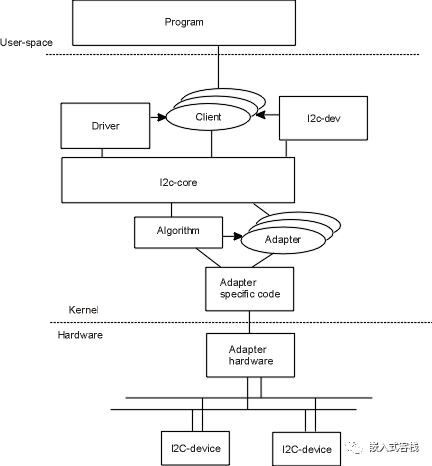
I2C 的core实现位于./drivers/i2c/下,实现了I2C总线设备以及驱动(适配器)和设备驱动的注册、注销方法,I2C通信方法algorithm抽象,以及与具体硬件无关的代码
I2C主控制器驱动位于 ./drivers/i2c/busses/,这里主要实现总线控制器,具体体现为i2c_adapter的实现。负责I2C适配器与从设备通信。I2C总线驱动由i2c_adapter和i2c_algorithm来抽象描述。
设备驱动则分散在./driver/下,这取决于具体的实现,种类繁多。
i2c-dev,大多位于drivers/i2c/i2c-dev.c,这种方法只是封装了主机(I2Cmaster,一般是SoC中内置的I2C控制器)的I2C基本操作,并且向应用层提供相应的操作接口,应用层代码需要自己去实现对slave的控制和操作,所以这种I2C驱动相当于提供给应用层可以访问slave硬件设备的接口,本身并未对硬件做任何操作,应用需要实现对硬件的操作。这种模式也称为应用驱动程序。
另一种I2C驱动是将所有的代码都放在驱动层实现,直接向应用层提供最终结果。应用层甚至不需要知道这里面有I2C存在,譬如电容式触摸屏驱动,直接向应用层提供/dev/input/event1的操作接口,应用层编程的人根本不知道event1中涉及到了I2C。
I2C子系统的主要目的是,对I2C总线以及设备利用面向对象编程思想实现统一建模,以高内聚-低耦合的软件工程思想,实现一个分层体系结构,以便于内核统一管理I2C设备,从而可以更容易的在linux下实现I2C设备以及高可移植。
主要数据结构
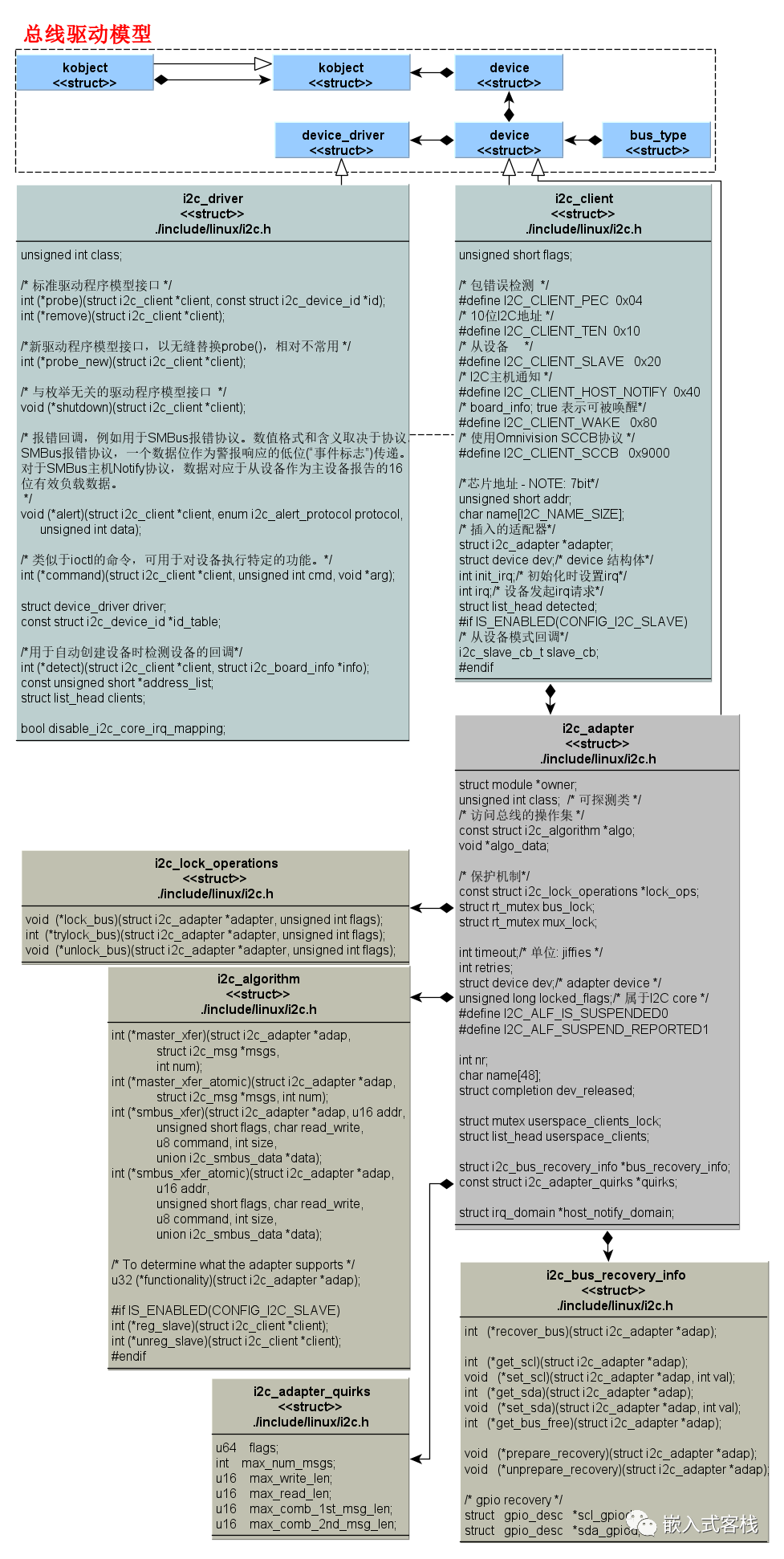
其内部有几个关键数据结构,来梳理一下:
i2c_client, 用于抽象挂载在I2C总线上的从设备
i2c_driver,用于驱动挂载在I2C总线的从设备,也即从设备的设备驱动程序
i2c_adapter,用于抽象I2C的主设备
i2c_algorithm,抽象I2C总线操作接口
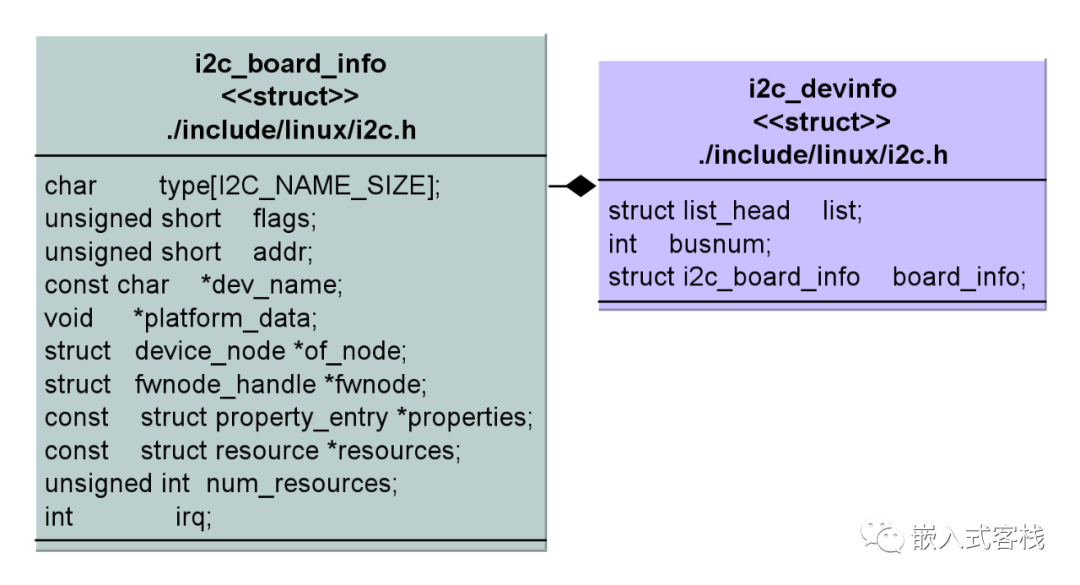
i2c_devinfo
该结构体主要用于板级I2C信息管理
i2c_msg
该结构体主要用于抽象I2C报文,其内容如下: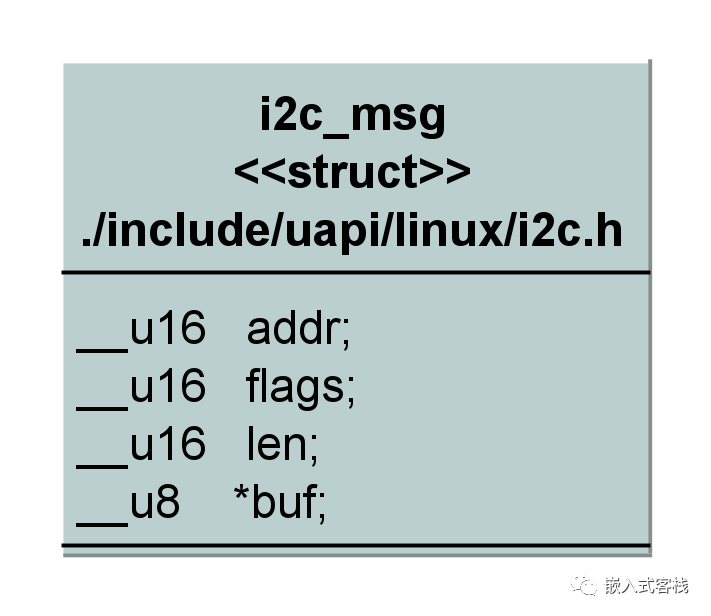
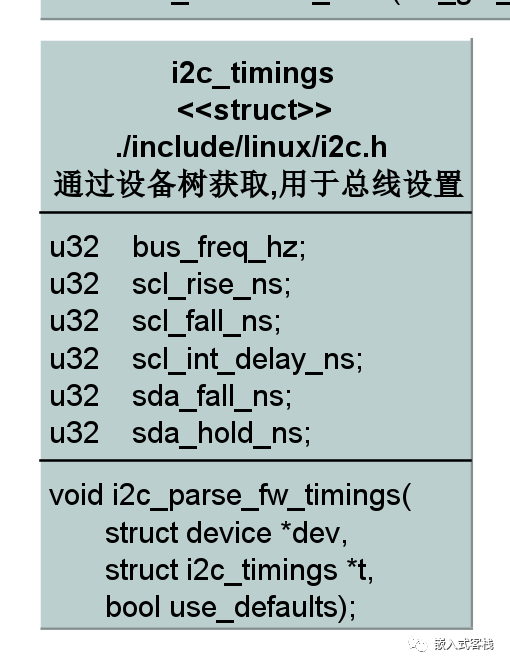
i2c_timings
主要用于抽象I2C电气特性,对于支持设备树的系统构建而言,主要通过以下内核接口函数,从设备树解析电气特性参数。
void i2c_parse_fw_timings(struct device *dev, struct i2c_timings *t, bool use_defaults)
{
int ret;
memset(t, 0, sizeof(*t));
ret = device_property_read_u32(dev, "clock-frequency", &t->bus_freq_hz);
if (ret && use_defaults)
t->bus_freq_hz = 100000;
ret = device_property_read_u32(dev, "i2c-scl-rising-time-ns", &t->scl_rise_ns);
if (ret && use_defaults) {
if (t->bus_freq_hz <= 100000)
t->scl_rise_ns = 1000;
else if (t->bus_freq_hz <= 400000)
t->scl_rise_ns = 300;
else
t->scl_rise_ns = 120;
}
ret = device_property_read_u32(dev, "i2c-scl-falling-time-ns", &t->scl_fall_ns);
if (ret && use_defaults) {
if (t->bus_freq_hz <= 400000)
t->scl_fall_ns = 300;
else
t->scl_fall_ns = 120;
}
device_property_read_u32(dev, "i2c-scl-internal-delay-ns", &t->scl_int_delay_ns);
ret = device_property_read_u32(dev, "i2c-sda-falling-time-ns", &t->sda_fall_ns);
if (ret && use_defaults)
t->sda_fall_ns = t->scl_fall_ns;
device_property_read_u32(dev, "i2c-sda-hold-time-ns", &t->sda_hold_ns);
}
EXPORT_SYMBOL_GPL(i2c_parse_fw_timings);
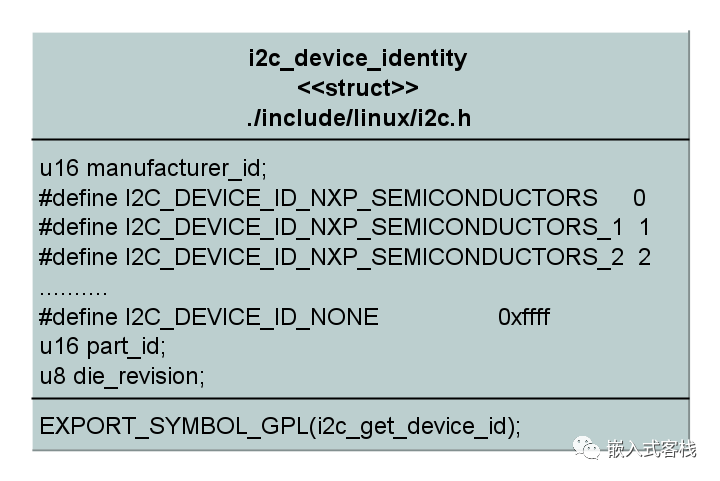
i2c_device_identity
该结构体主要用于抽象I2C 设备的ID属性,通过内核接口函数i2c_get_device_id以获取设备ID属性。
总体框架
概述
Linux I2C编程接口支持总线交互的主端和从端。从高层级看由两种驱动程序和两种设备构成:
适配器设备与适配器设备驱动对:I2C 适配器驱动程序用于抽象控制器硬件;它绑定到一个物理设备(可能是一个PCI设备(PC体系多一些)或platform_device(嵌入式应用居多)),并构建i2c_adapter实体以呈现所管理的1个I2C总线段。
/* ALI1535 device address register bits */ #define ALI1535_RD_ADDR 0x01 /* Read/Write Bit in Device */ /* Address field */ /* -> Write = 0 */ /* -> Read = 1 */ #define ALI1535_SMBIO_EN 0x04 /* SMB I/O Space enable */ /*PCI 设备驱动*/ static struct pci_driver ali1535_driver; static unsigned long ali1535_smba; static unsigned short ali1535_offset;
pci-I2C 适配器设备。如在i2c-ali1535.c中:
platform_device。比如:i2c-s3c2410,如下:
static const struct platform_device_id s3c24xx_driver_ids[] = {
{
.name = "s3c2410-i2c",
.driver_data = 0,
}, {
.name = "s3c2440-i2c",
.driver_data = QUIRK_S3C2440,
}, {
.name = "s3c2440-hdmiphy-i2c",
.driver_data = QUIRK_S3C2440 | QUIRK_HDMIPHY | QUIRK_NO_GPIO,
}, { },
};
MODULE_DEVICE_TABLE(platform, s3c24xx_driver_ids);
I2C从设备及设备驱动:每个I2C总线段上将有一个由结构i2c_client表示的I2C设备。这些设备将被绑定到一个struct i2c_driver,遵循标准的Linux驱动程序模型。
架构
图片来源//www.kernel.org/doc/html/latest/i2c/slave-interface.html
主端总线驱动职责:
适配器和算法驱动程序,见下面i2c_algorithm结构体详细描述
管理I2C总线交互
从端设备驱动职责:
i2c_client结构体具有设备的I2C总线地址以及适配器的驱动程序指针
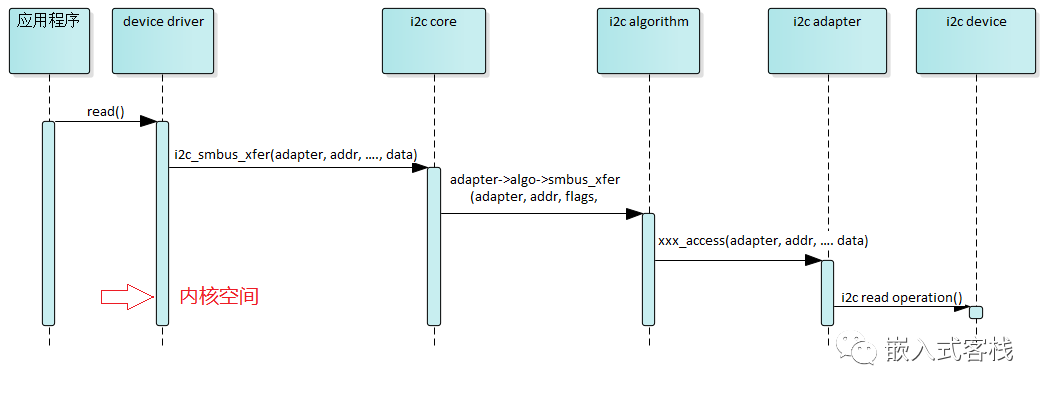
当用户程序发出文件操作申请I2C事务时:
i2C_transfer (i2C-core.c) 调用 adap_algo_master_xfer,数据或消息以i2c_msg结构体传入。
适配器对硬件I / O地址进行读/写操作,实现底层的I2C读写设备操作。
从应用程序直到底层的大致交互流程如下:
总结一下
I2C总线子系统在Linux内核中总线模型分为主/从两端,主端主要有适配器以及适配器驱动负责管理总线,从端主要有从设备抽象以及设备驱动,实现具体的从设备应用。主端适配器以两种形式存在于内核代码中,分为PCI桥接适配器或者platform_device形式。从总体理解I2C子系统的驱动模型,以及相应主要数据结构之间的关系,将有助于开发调试驱动程序,快速定位问题。
审核编辑:汤梓红

从profibusDP转ModbusTCP,一网打尽转换技巧!



 关注微信
关注微信